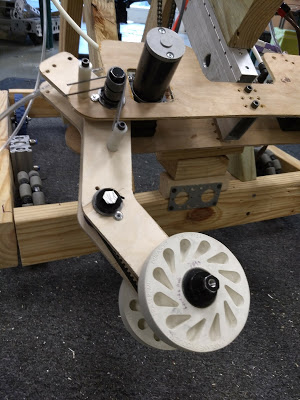
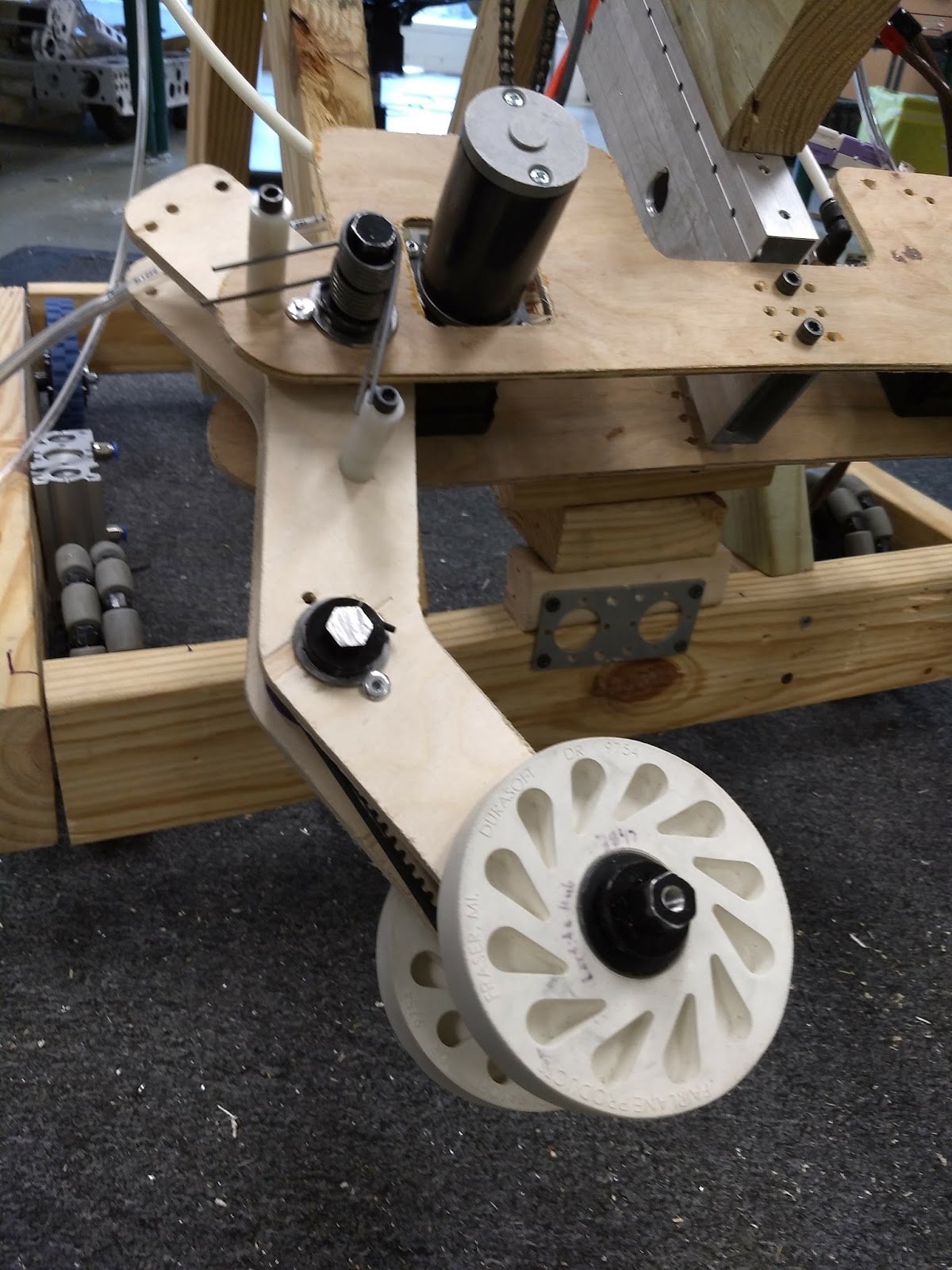
Springs on the Intake
If people are looking for a cheap way to do a compliant intake without pneumatics or as a back up (which is what we are doing so in case we vent during a match we can still intake), adding some torsion springs is pretty easy. These fit right around 1/2″ hex shaft and are almost exactly .5″ tall so they just replace a spacer. Add some bolts to either side and you’re done.
https://www.mcmaster.com/#9271K622
https://www.mcmaster.com/#9271k687/=1bj02fu
We found that two spring on each side of our intake worked well enough but the pneumatics definitely are better for adjusting the compression to get it just right. Having them work together means we will still be able to score gears even if we accidentally vent during a match (or start a match without air, etc). We will also be able to use less air to squeeze the cubes then if we only used air. They will be mounted much cleaner on the real robot, this was just for the quick tests to prove the concept and figure out how much force we needed. We tried a few different bolt placements since that changes the lever arms on the springs and the intake arms.


Lab Dog
We heard all the good teams have lab dogs so we had Cream visit the lab today. We even got one in our color scheme so we didn’t have to talk about how to make it white.

Practice Bot Wiring and Assembly
The production on the practice bot continued. We found more little things to tweak to make working on the robot that much better in the future (you know like not having rip out large structural members just to change some wires, things like that).

We added some nice wheel guards so our internal wheels don’t start grabbing stray wires. These are made out of 0.020″ polycarbonate (0..015 seemed a little thin, and 0.030 seemed like overkill).

– Spectrum
“If you want to be incrementally better: Be competitive. If you want to be exponentially better: Be cooperative.”
Source: Spectrum