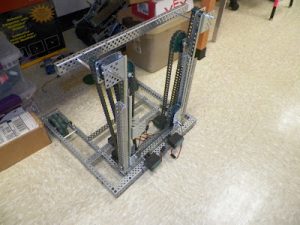
We made a 1/5th scale model of one of our climber ideas. This one has several issues, and some of them are caused by it being scaled-down, and some of them are likely inherent in the design.


More videos and photos can be found in our photo gallery:
https://photos.spectrum3847.org/2022-FRC-1/2022-Build-Season-1/Week-1/
From playing with this model and doing more CAD sketches, we will likely add another degree of freedom to the system, most likely a motor (possibly pneumatic) to extend and retract the hook on the arm. This should allow the climb to behave correctly across various center of gravity positions and enable us to quickly climb to the mid-bar without fully completing the first curl of the whole climb sequence. We also still discussing if we will use chain/sprockets or a Dyneema cord winch to power the arm joint.
Here is a sketch of the new configuration; this has a 6 in extension and appears to work with a center of mass 6.5″ to 15″ and roughly centered in the robot. Not shown, but if we needed this climb should be able to curl onto the low bar for 4 pts.

– Spectrum
Source: Spectrum