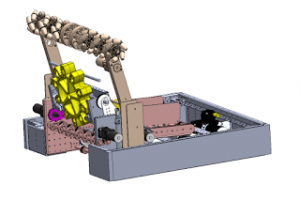
Short post today. We got the complete prototype drive train working. Please note the pneumatic is just for the real robot will be much smaller. That’s just what we had lying around that would work for our goals.
We tested this briefly on our practice bot form last year and saw that the concept works. It works a bit better on this robot. The gyro should be able to do the steering for us and keep us moving straight sideways during autonomous and when adjusting for stacks.
This week we will be getting the tower and supports made and hopefully have this robot stacking totes by the weekend.
– Spectrum
“He that does good to another does good also to himself.” – Lucius Annaeus Seneca