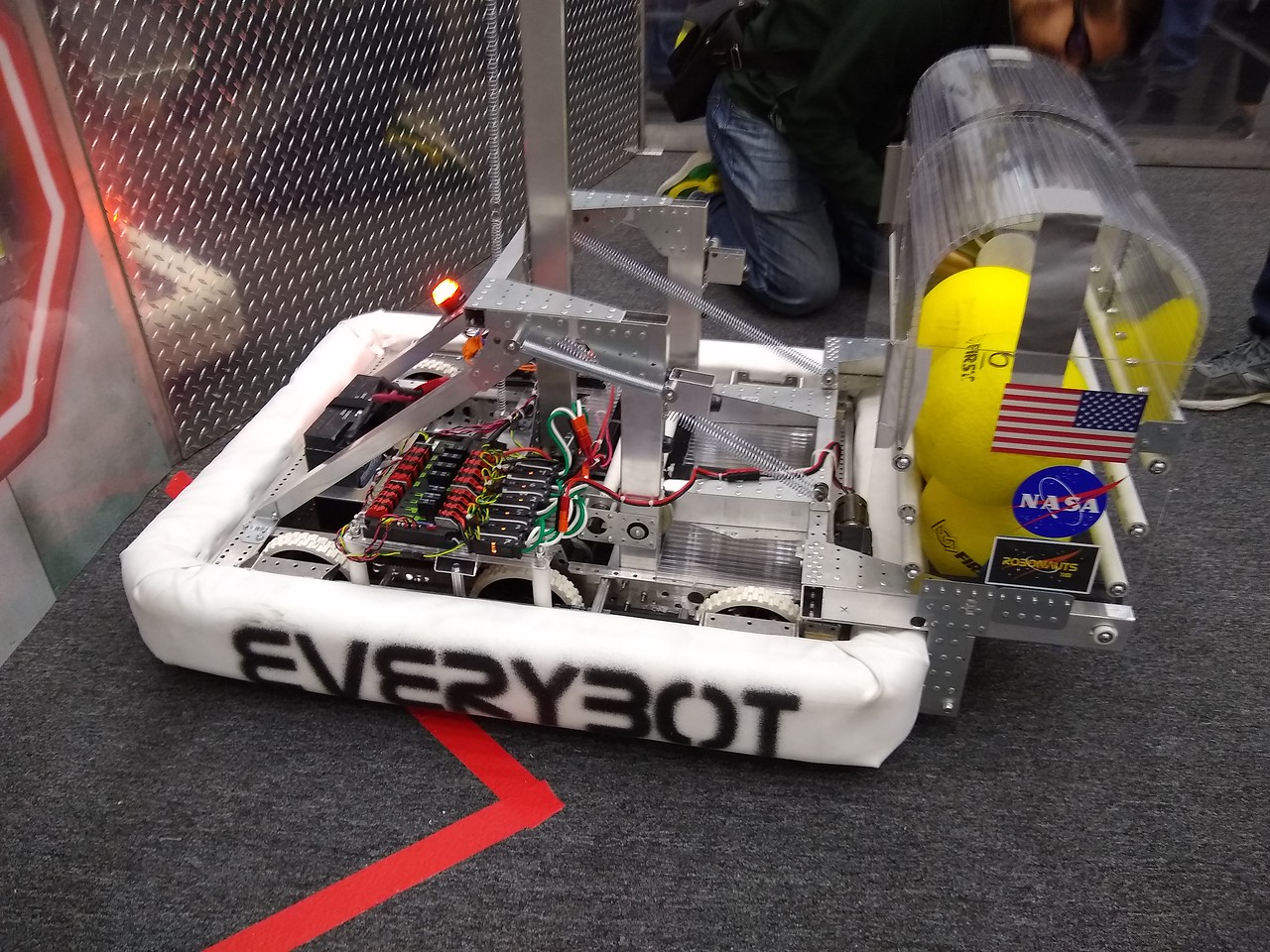
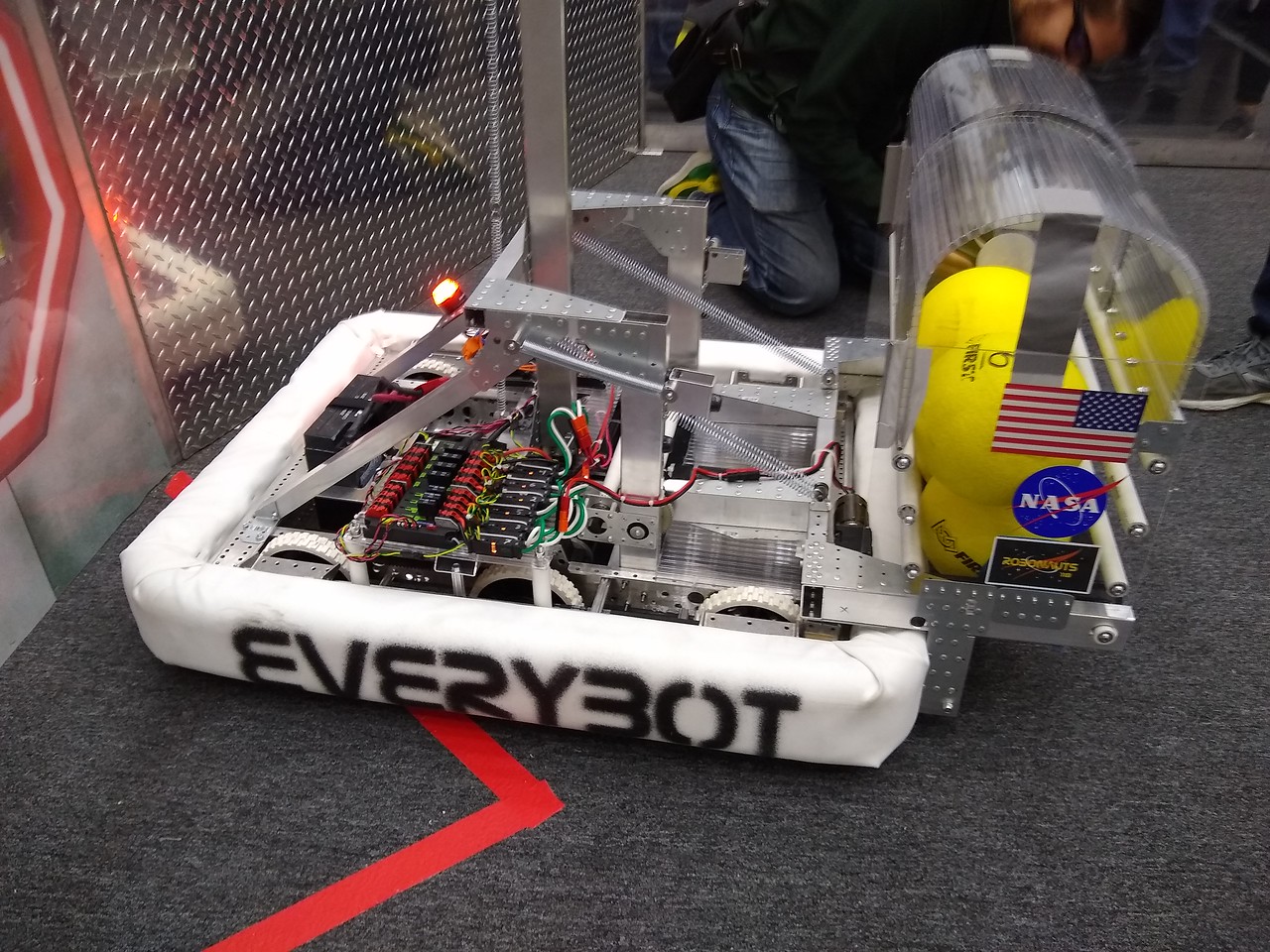
Everybot and Week 6 Robots
This past Sunday, Spectrum was able to attend an event hosted by the Robonauts were Everybot and Week 6 demonstrated game play together. Both robots were very well done for only needing one week to complete.
Takeaways (Some are just confirmations of what we already knew)
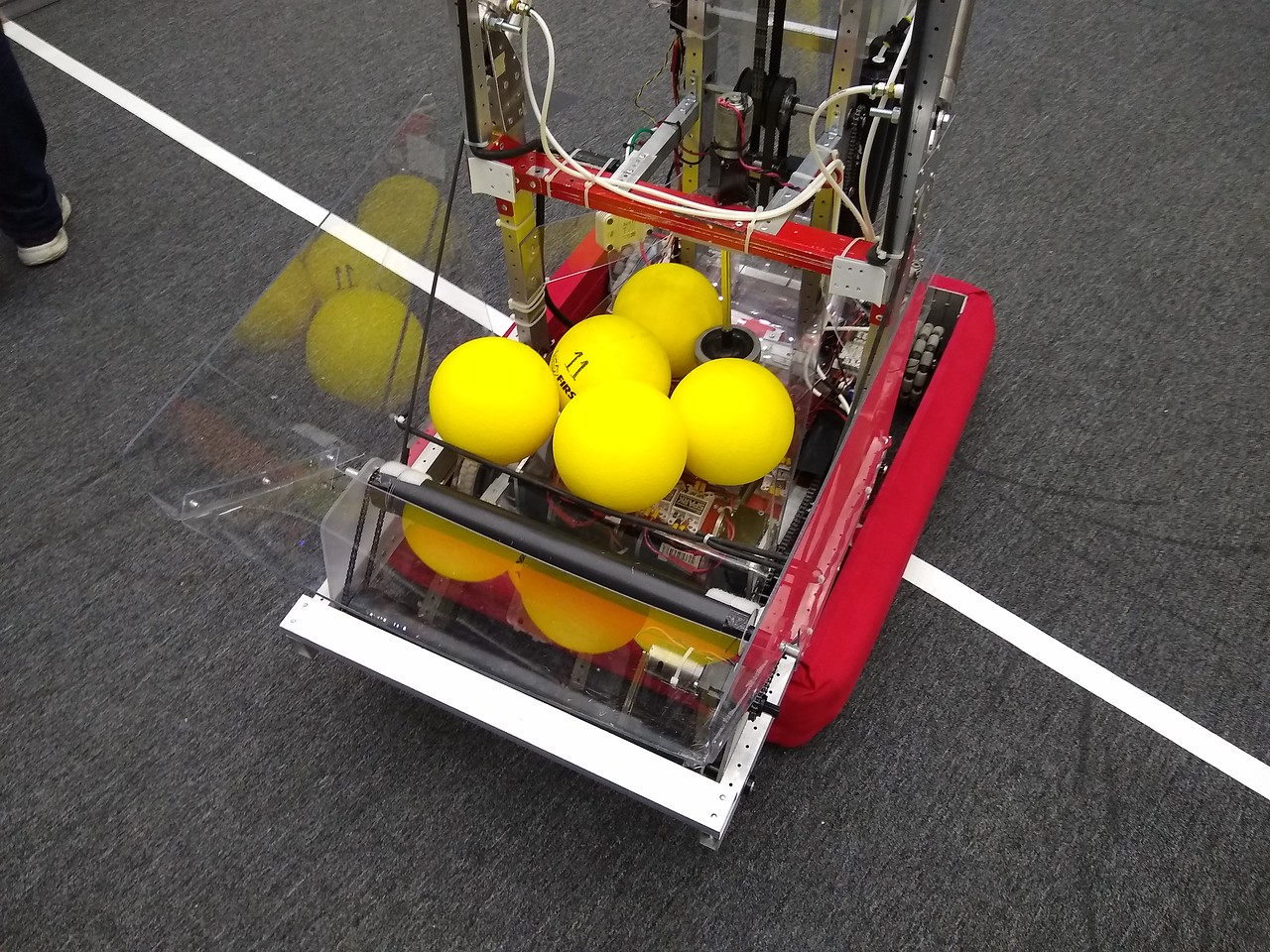
- The outer goal is very large. Week 6 was able to easily manually aim their robot to score consistent shots.
- Fast low bots may have value in getting up to the RP level of balls but you need to be very quick in getting balls dumped into the goal and quick at intaking balls. Everybot does both very well.
- The balance even on the wooden switch didn’t seem hard to accomplish. A reliable and consistent climb will be incredibly important.
- Driving across the Dance Floor (rendezvous points) will test how robustly made a lot of robots are. Make sure you test your robot driving over 1″ bumps (the kit 2×1 is a good approximation) before coming to your first event. We are going to see a lot of radios, roboRIOs, batteries and other electronics and connectors come loose if they are only zip tied loosely to robots.
More photos and videos are in our photo gallery.
Shooter Prototype V2
Hopefully will have test shots tomorrow after we make it a little more rigid.
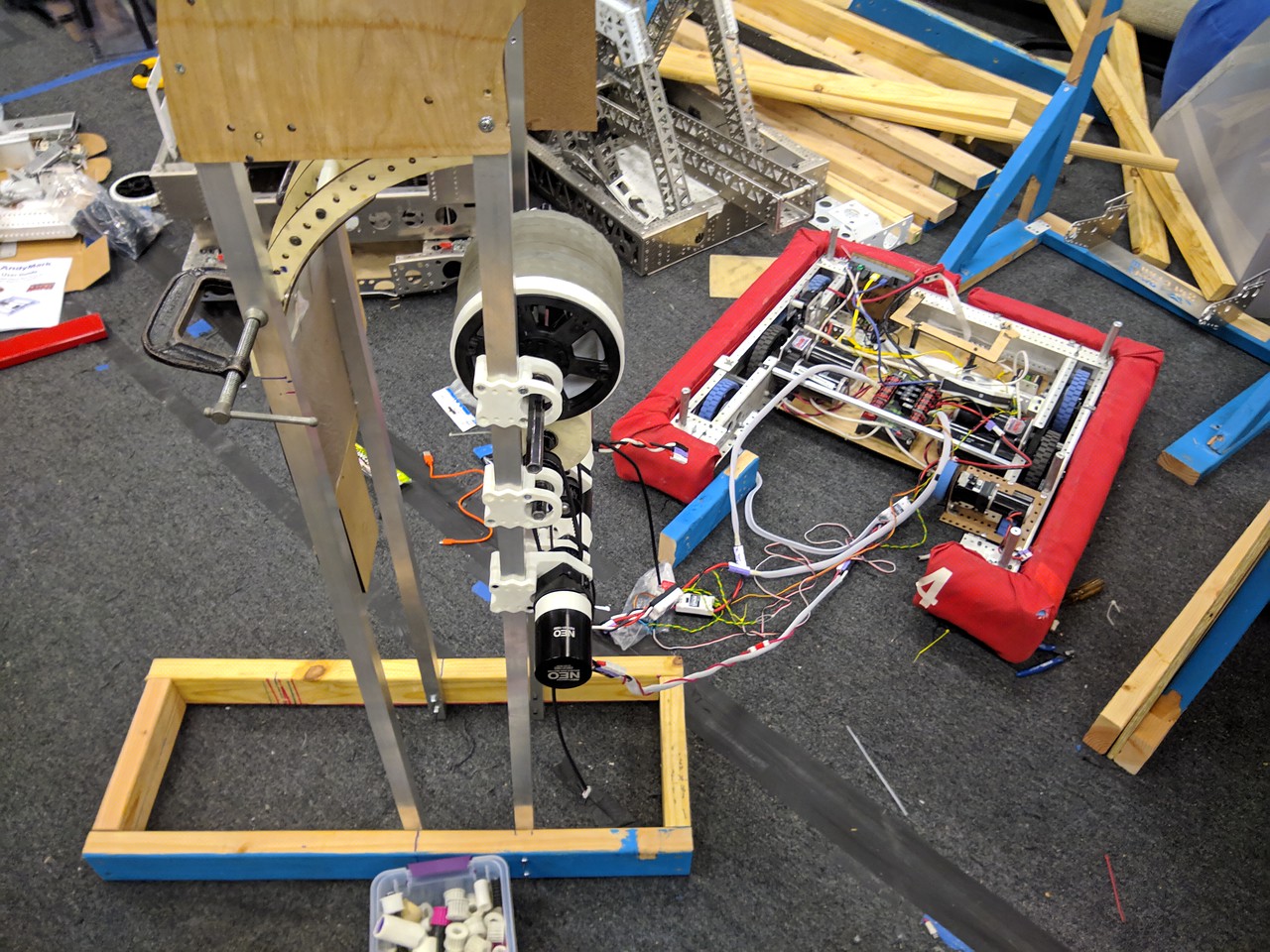
Intake/Indexing
Intake and indexing plans are still up in the air. We are re-investigating an intake similar to 971’s from 2012. At first we didn’t think it would package nicely but after some other changes to the design we think we can make it fit, but we need to build a better model to make sure it will index the balls fast enough for our robot.

Robots that inspired us today
2012 – 971 (intake & ball funneling), 2056 (ball funneling)
2013 – 180 (shooting game objects inside of your robot)
2017 – 125 ( 4-bar intake)
Spectrum
Source: Spectrum
