Shooter Testing
We did more shooter testing today. We made several changes all at once we normally try not to do but circumstances were somewhat beyond our control. The modified VEX traction tire we had been shooting with had a failure and one of the tires broke apart. We won’t be using that wheel anymore for our development of competition. It’s possible it was just our implementation but we will be going with a solid wheel from here on out. We moved to 2x 6×1.5″ colsons wheels we had from our 2015 drive train.
We also changed the gearing to move the NEOs to 1:1.5 with a 36 tooth pulley on the NEO output and a 24t on the shooter wheel. We did some tests with the accelerator wheel on it’s own NEO and then moved to a setup that had the 4″ accelerator wheel ganged together with the colson shooter wheels 1:1 and only shot using 2 NEOs. The smaller diameter means that the 4″ wheel will have a reduced surface speed.
We also tested our shooter with a new backing of yoga mat foam and Teflon sheet. This backing still couldn’t let us nicely shoot ball #14 (a ball that has previously been sliced open multiple times in a belt prototype). Once the balls have enough cuts, rips, tares, and holes to vent at a similar rate to a new ball they become very hard to shoot.
Here is one of our tests. The one ball that lands short is the ball that has multiple cuts through the skin. It compresses far easier than the other balls and the yoga foam doesn’t seem to help.
After we adjusted the angle we were able to start hitting the 3 point inner goal from approximately the initiation line.
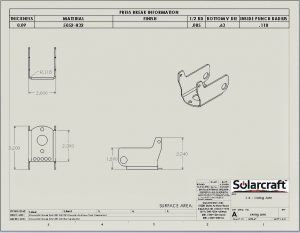
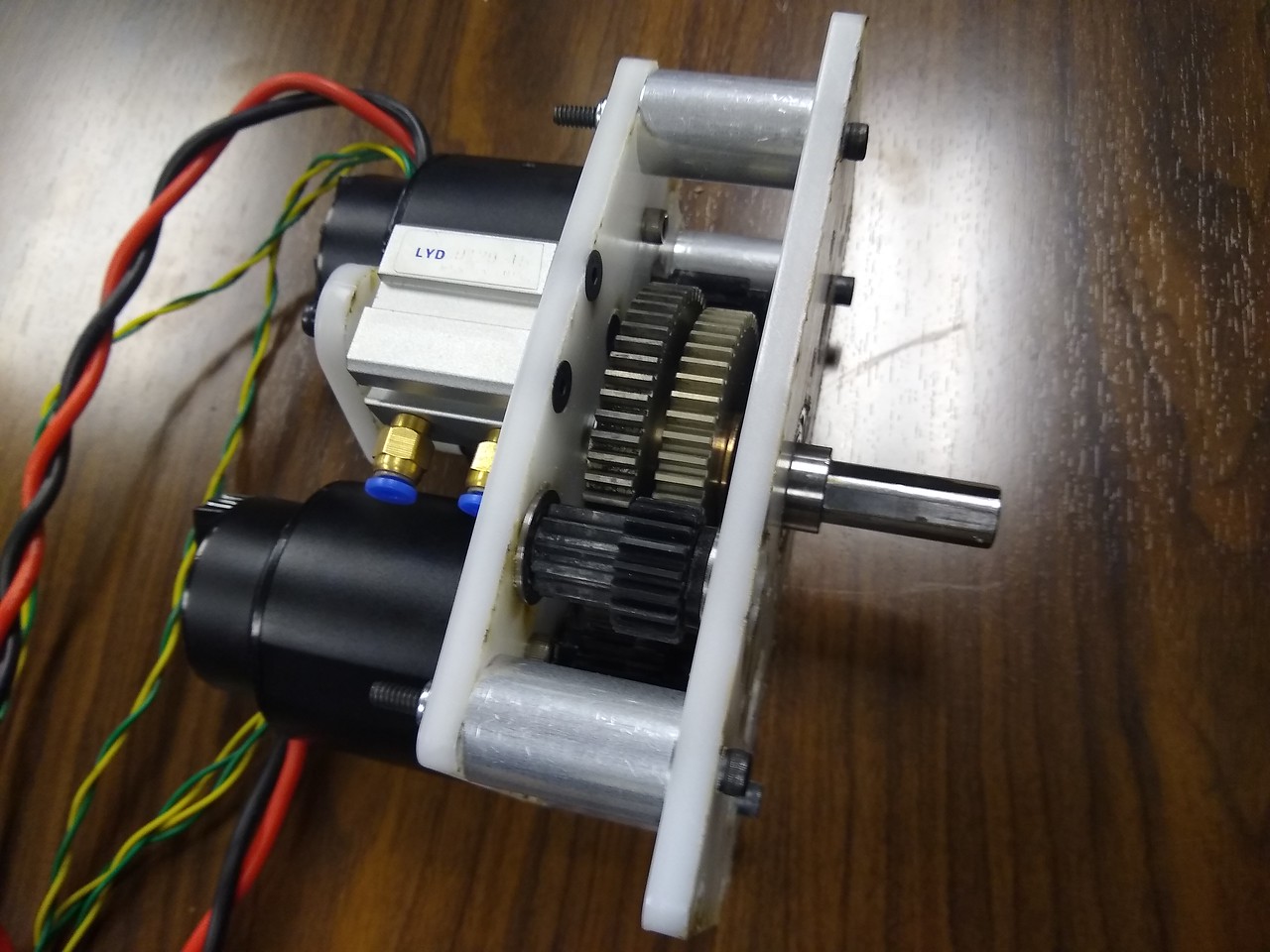
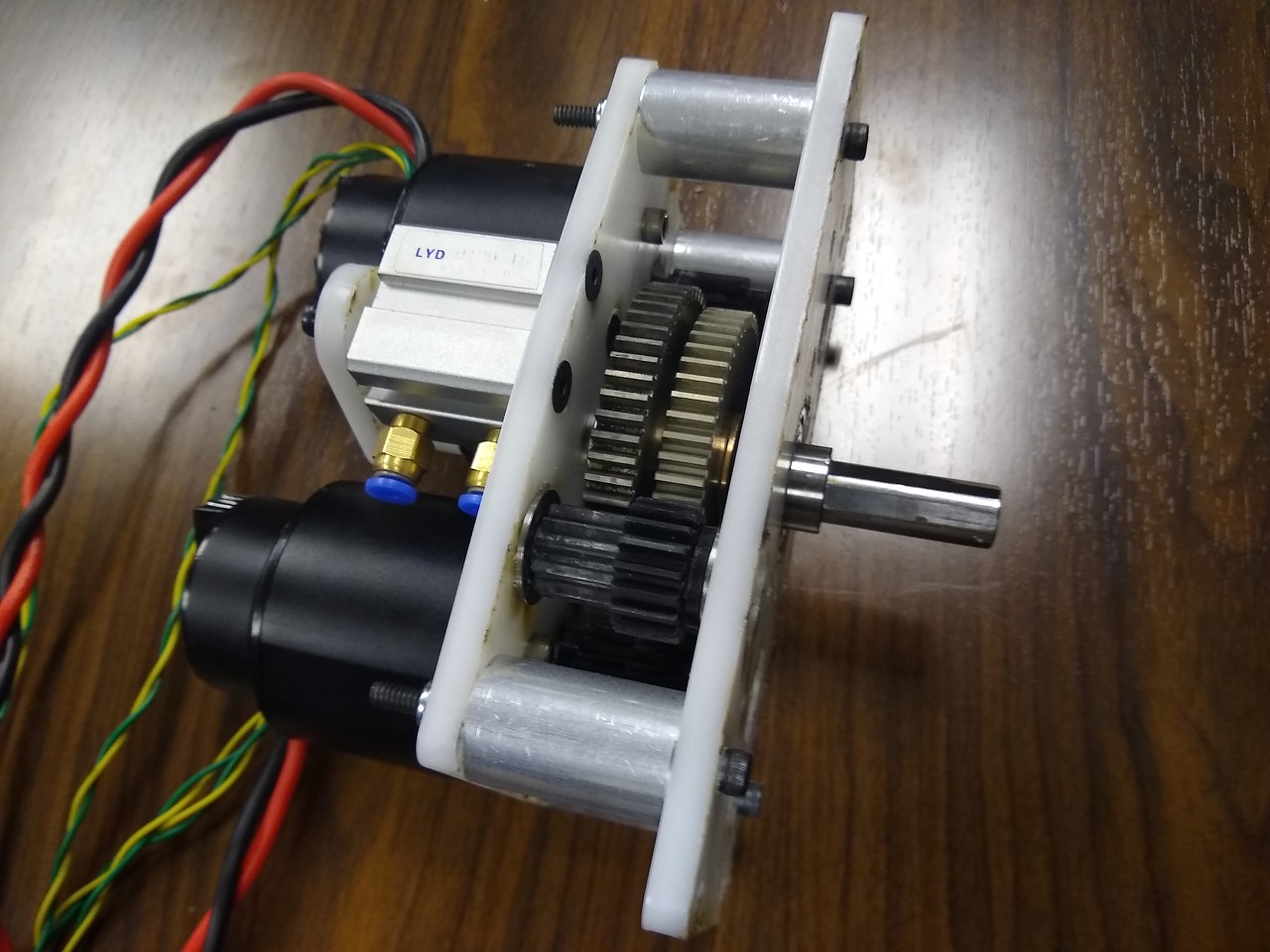
Drive Gearbox
The test fit of our drive gearboxes was done today. The competition versions will be 1/4″ Aluminum plate but we can make sure everything working out of delrin or polycarbonate on our laser cutter. We are using a gearbox design inspired from this thread by Evan Morrison. Our implementation isn’t direct drive so we can simplify some things as we don’t need as much reduction. The 32:12 chain reduction to the wheels will get us a large part of each gears overall reduction. The spacers are 7/8″ round tube with 3D printed inserts.
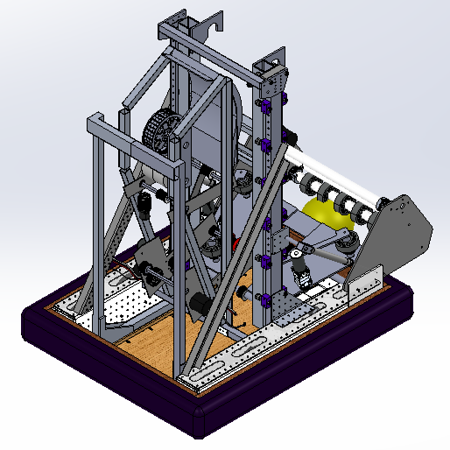
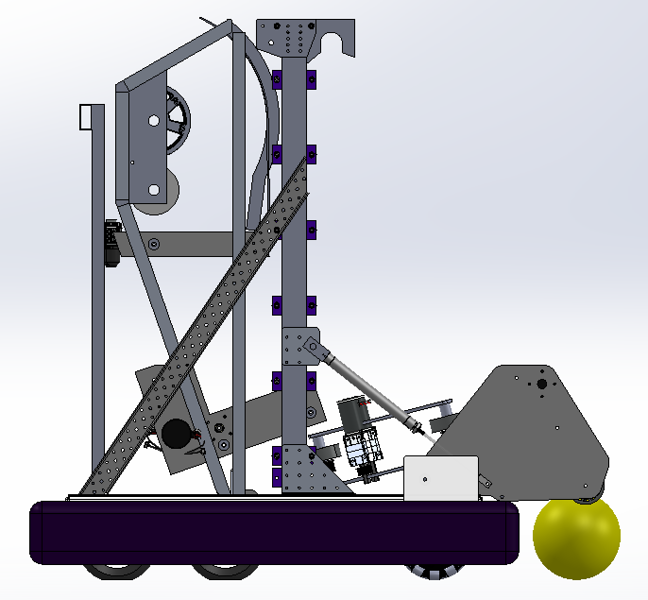
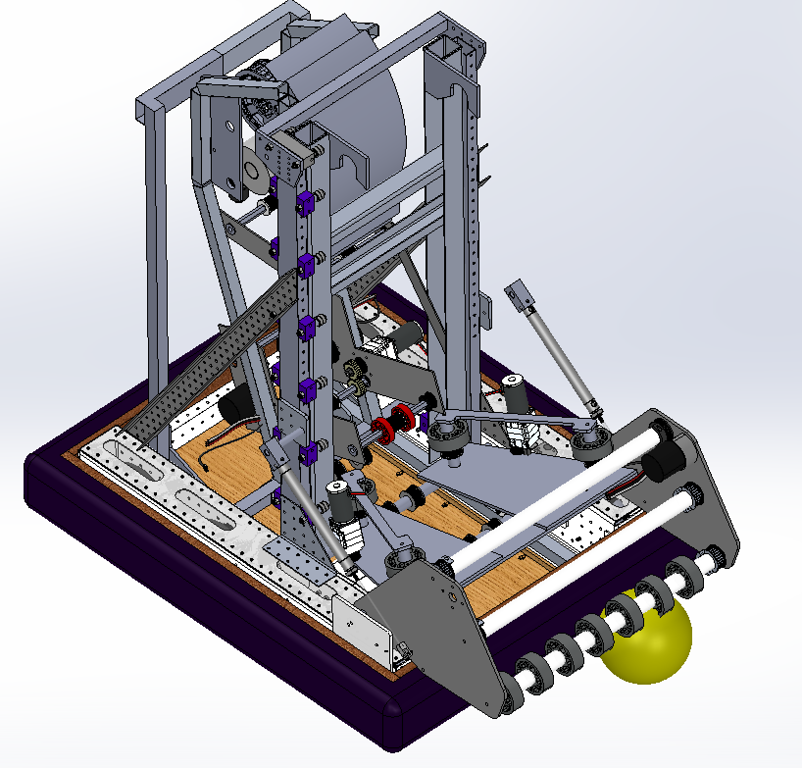
Block Robot Update
More of the design is starting to take shape.
Everybot Documentation is out
The awesome people behind Everybot have released this year’s build guide and a brand new website. If your team is struggling to figure out what to build, building a robot based on the Everybot is a great idea. This robot will be effective in the 2020 FRC game for a large number of teams, definitely think about if your team should be one of them, it’s a really good idea. Maybe you have another idea for a ball mechanism but just want to use their climbing mechanism, that works too. No matter what reading through their documentation will make you better at building robots and give you new ideas.
Spectrum
Source: Spectrum