Many teams have asked us about our climber break from last season. We mentioned possibly using it this season and showed a small CAD image.
Last season we planned to use the VP ratchet in a normal way and have a cylinder pull a string to disengage the pawl. When we did that we either could disengage the pawl or couldn’t engage it properly. We also heard of people breaking the pawls.
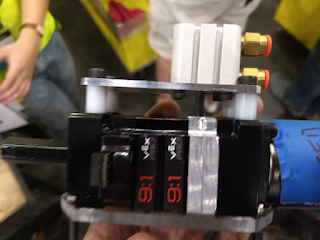
While at champs we were looking for a way to brake our climber that didn’t use the pawl. SOTAbots (FRC#25570 were in our division and they had a great climber break that they showed us. Here is a picture we took.

For IRI our setup looked like this.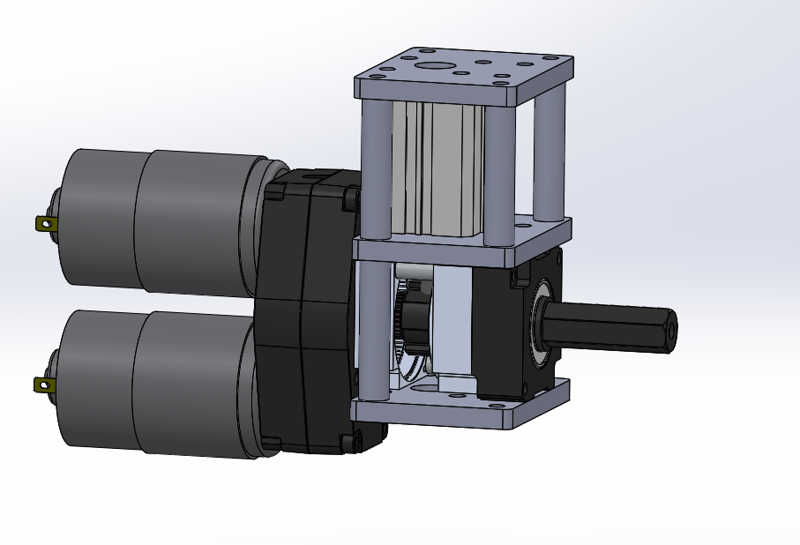
We have heard from several teams that have used this setup with great success. We aren’t using it this year. For Dripping Springs we were able to just use our NEO climb motors in brake mode, with about a 30:1 reduction on our elevator and our robot would stay in the air for more than enough time to keep the climb.
We do have a latch mounted on our robot.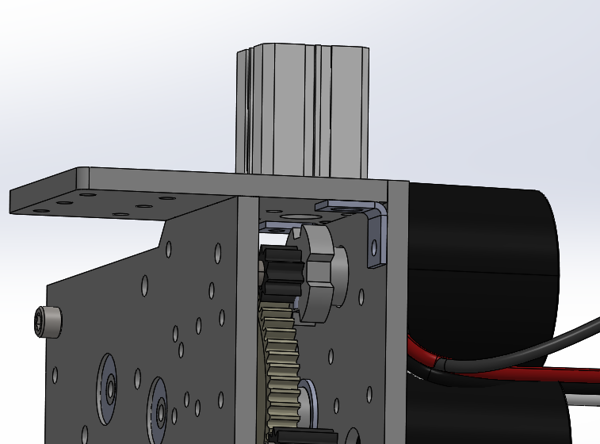
Spectrum
Source: Spectrum


