Just a short update of what we are working on.
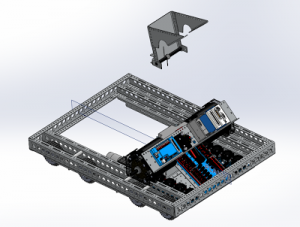
Our current plan is to have two seperate climbing methods depending on if we need to lift a partner or if we can climb alone.
With a partner we will use our fork lift and winch to lift both our robots at the point between the bumpers. This will let us reduce the amount of tipping during the lift.
When we climb alone we will use a curl at our arm joint so that we can curl away from any robot that has already climbed or if they have bars mounted to their robots.
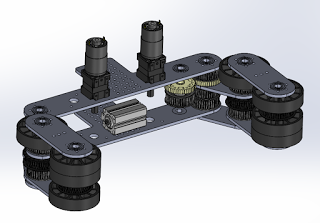
Intake Prototype
Our intake prototyping has gotten a bit more complicated to be able to meet all our requirements. It uses a virtual four bar belt and a pneumatic cylinder to move the pivots and compress the cube. It also has multiple co-axial movements.
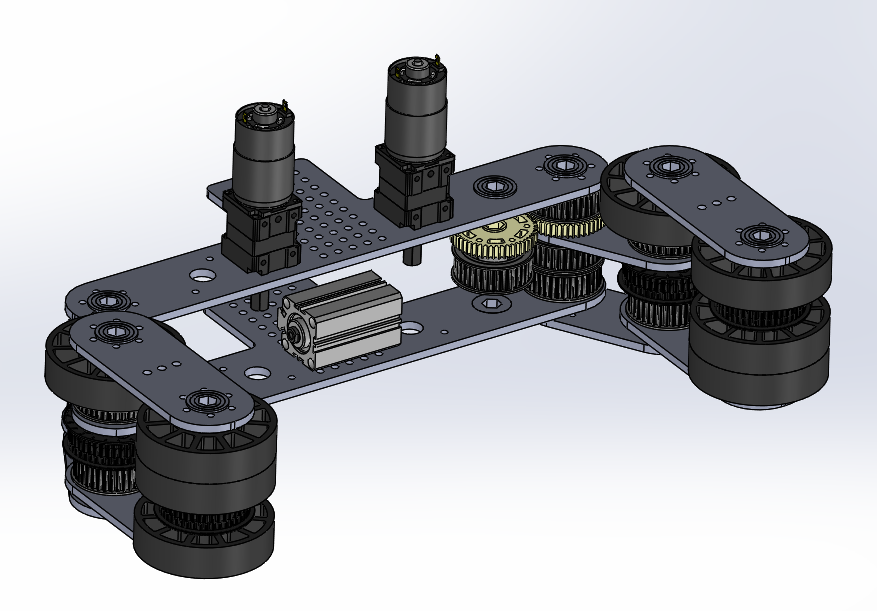
Should have it built tomorrow if we are able to print all the pulleys we need for it.
– Spectrum
“You cannot shake hands with a clenched fist.” – Indira Gandhi
Source: Spectrum