We took a short break after bag day and didn’t meet on Wednesday. We met Thursday but only really looked at reveal video and did a little work on the practice bot to reattach some of our withholding weight for testing. Friday and Saturday were spent volunteering at the South Texas VEX Championship. We helped setup the event and then we were referees, score keepers, and part of the field reset crew. With over 60 teams there it was a huge event. We had four fields running at once with a single division. The winning alliance was led by teams from Galveston.
Inspiration
There is currently a thread on Chiefdelphi.com about inspiration and generating new ideas from old ideas. We want to take this time to acknowledge of a few of the places were gained inspiration for some of the features on Infrared.
Ri3D Boom Done Team: If you look at our robot, you can see the overall structure of the systems is inspired by Boom Done. Dr. Joe Johnson and his team put together an extremely effective robot in only 3 days. We were really impressed by its versatility and that it had the potential to meet nearly all of our design goals. We had been building prototype catapults and punchers but we were worried about being able to implement systems to provide a wide variety of shots and passes. We also wanted an open top design with a back panel that would allow us to easily catch balls from the human player and possibly other robots. Boom Done’s overall structure met these goals. We also knew there were a lot of places for improvement after all it was designed in 3 days and we had six+ weeks. The collector was one of highest priorities; we wanted to be able to get the ball off the floor as quickly as possible. We also knew that leaving the collector deployed would increase the risk of it getting damaged and it wouldn’t allow the ball to be secured. We went through at least 4 major iterations on the collector before we got to the non-pivoting independently dropped down, Mecanum collector that we have today. We added wings to the side of the tower to help with catching and to secure the ball even more then we drive. We also knew that the launcher could be improved, because its motor powered we figured that if we added more motors we could increase its acceleration and thus increase the balls exit velocity again giving us a wider variety of shots. We prototyped the shooter using a 3 CIM gearbox that we had used on our previous year’s drive train. We replaced one of the CIMs with two 775s to give us even more power. We have been experimenting with constant force spring on the launcher bar to help with acceleration even more but there are some draw backs, such having to lock the launcher down instead of just having it rest at any point. Our drive train is also different but that was inspired by another team.
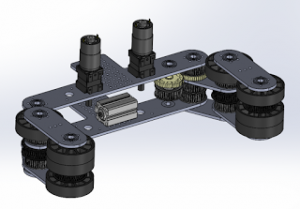
Team 3928 Neutrino and Aren Hill: We didn’t use the choo-choo mechanism that many people are so found of that Aren Hill demonstrated this year but we were inspired by a drive train that he helped design last season. Neutrino’s butterfly modules were extremely impressive when we were pit neighbors with them this summer at IRI. The simplicity of just pushing down on the module and having it sprung up on its own was very cool. Our original plan was to use their shifting concepts in an octocanum configuration but we ended up back at butterfly after a few problems. We modified it to allow us to add MiniCIMs to each module and also include 2″ wide traction wheels. Another difference is we put our omni-wheels to the outside of the frame which makes our traction drive a little less stable but it does allow it to turn better.
Sheet metal Designs of 148, JVN, and many others:
We have been learning about sheet metal design for the past two seasons. When we first got into it we looked really closely at the Robowrangler robots from previous years, like Raptor and Tornado. We also had a huge number of our questions answered by JVN. Since then we have been improving and had a student learn to run the laser and the break to cut and bend all our parts. These two threads on chiefdelphi provided a huge amount of advice on solid drive train design. Thanks to the mentors from 971, 973, 488, and others.
We have been learning about sheet metal design for the past two seasons. When we first got into it we looked really closely at the Robowrangler robots from previous years, like Raptor and Tornado. We also had a huge number of our questions answered by JVN. Since then we have been improving and had a student learn to run the laser and the break to cut and bend all our parts. These two threads on chiefdelphi provided a huge amount of advice on solid drive train design. Thanks to the mentors from 971, 973, 488, and others.
610 Helpful Tips:
We posted about this earlier but this thread on Helpful hints for all is a great read. Because of it, we added an attached velcro strap to our SB50 Battery connector, we stood off our Power Distribution board from the belly pan to allow us to mount things under it (Radio power inverted and lights), and we added wire rope and pneumatic tubing handles (These might be the best feature on our robot). In a different thread Mr. Lim of 610 led us to these potentiometers. They are continuous rotation single turn pots, and we use one our launcher and they’ve been great.
We posted about this earlier but this thread on Helpful hints for all is a great read. Because of it, we added an attached velcro strap to our SB50 Battery connector, we stood off our Power Distribution board from the belly pan to allow us to mount things under it (Radio power inverted and lights), and we added wire rope and pneumatic tubing handles (These might be the best feature on our robot). In a different thread Mr. Lim of 610 led us to these potentiometers. They are continuous rotation single turn pots, and we use one our launcher and they’ve been great.
On board volt meter from team 1818:
This is one of the best features we have put on a robot– it weighs almost nothing and just plugs in to our terminal strip for the lights. It couldn’t be simpler. We bought ours from overseas but Adafruit and others sell them. We expanded this concept to the entire back panel of the robot, which is the central display for all the information on the robot.
This is one of the best features we have put on a robot– it weighs almost nothing and just plugs in to our terminal strip for the lights. It couldn’t be simpler. We bought ours from overseas but Adafruit and others sell them. We expanded this concept to the entire back panel of the robot, which is the central display for all the information on the robot.
VEXpro:
Our last two robots have relied very heavily on VEXpro products. Nearly all the gears, sprockets, and pulleys on Infrared are from VEXpro. Their Versaplanetary gearboxes allow for some extremely nice designs because of the reduction you can get in such a small package.
Our last two robots have relied very heavily on VEXpro products. Nearly all the gears, sprockets, and pulleys on Infrared are from VEXpro. Their Versaplanetary gearboxes allow for some extremely nice designs because of the reduction you can get in such a small package.
Thank you to all the people that have inspired our design choices and more than anything taught us cool things– that’s one of our favorite parts about the FRC community.
– Spectrum
“It’s a great thing, for someone to feel that they can draw inspiration from you.” – Chloe Sevigny