We worked out a few more iterations and developments today but made no major changes.
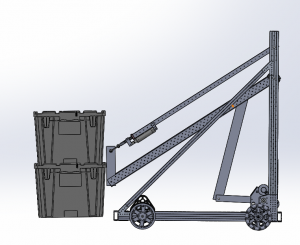
We started looking at quick ways to drag totes from the landfill. We could use our lifting mechanism, but speed may be crucial once game play prioritizes the race to get to the recycling containers. The tasks that are important to a single robot aren’t always those that are important to an alliance. This may be like the human player pass back last year; it didn’t directly give an alliance points, but it had the potential make or break its strategy.
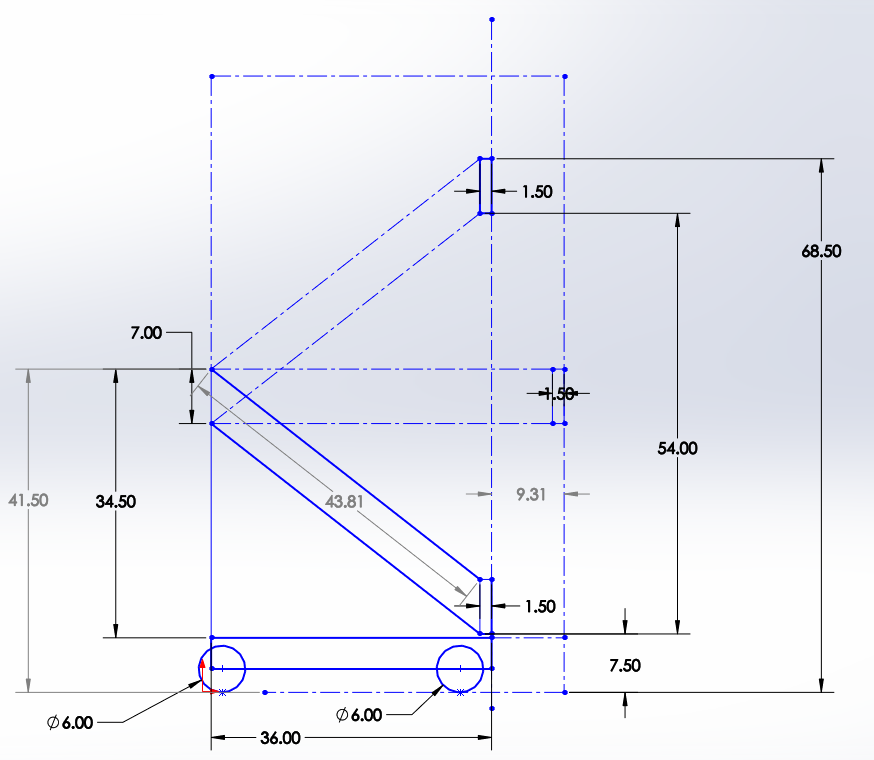
Most of the day was spent reworking the dimensions of our frame and 4-bar. We realized it would be beneficial to have a long, narrow robot this year. A long wheel base would make a robot more stable when carrying the weights of totes and containers on its lifting mechanism. A narrow track (the distance between two wheels sharing an axle) would allow a robot to navigate more easily through a congested field. We are currently looking at a frame size of 24-27″ x 36-38″. A 28″ x 38″ robot was the common frame size before the 2013 frame perimeter change. It worked very well in FRC for a long time. Our frame dimensions directly affect the length and heights of our 4-bar mechanism. Our current goal is to be able to elevate 4.5 ft, enabling us to place a tote on a stack of 3 already on the step and helping us to earn Coopertition points. Reaching this height would also allow us to place a Recycling Container on a stack of 4 totes on a scoring platform. So far, this seems like the most reasonable plan. This would allow a team to contribute to a high scoring alliance or to score highly if carrying the majority of its team’s scoring load. For example, if a team is allied with two robots that cannot lift game objects, its allies should be able to push stacks of two totes from the feeder station onto the platform. Afterwards, the team could combine those two stacks and place a Recycling Container on top of them for additional points.
While achieving our 4.5 ft. elevation, we also want to minimize the distance our arm travels past our frame perimeter to keep us more stable.
“Perfection is achieved, not when there is nothing more to add, but when there is nothing left to take away.”
– Antoine de Saint-Exupery