


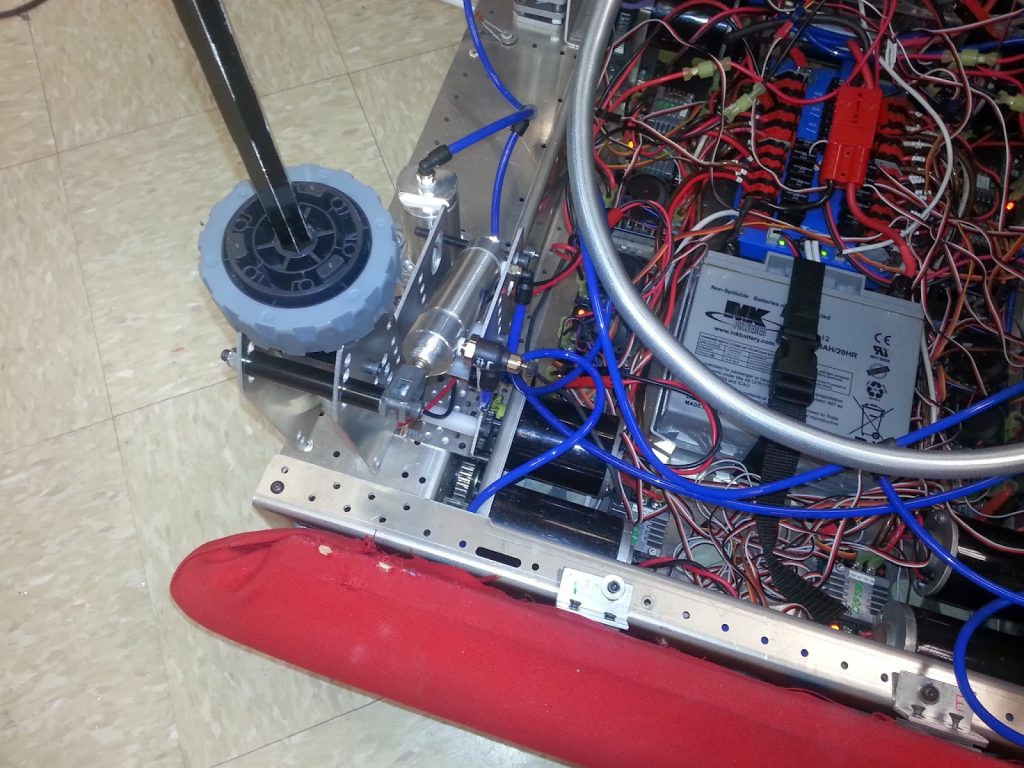
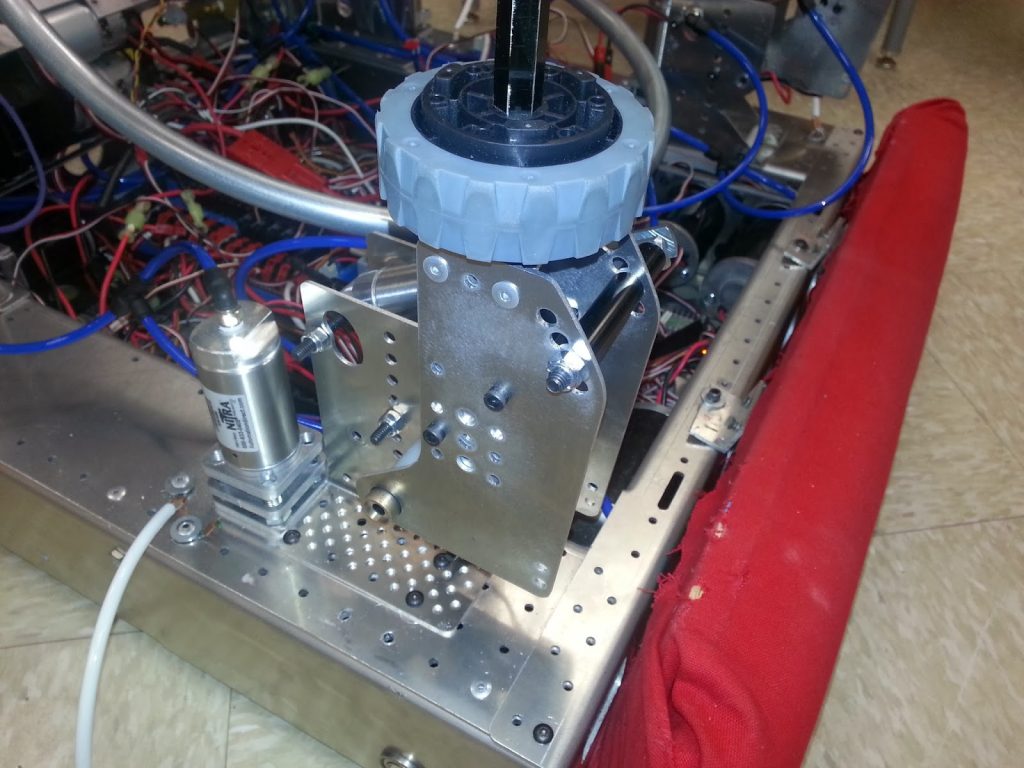
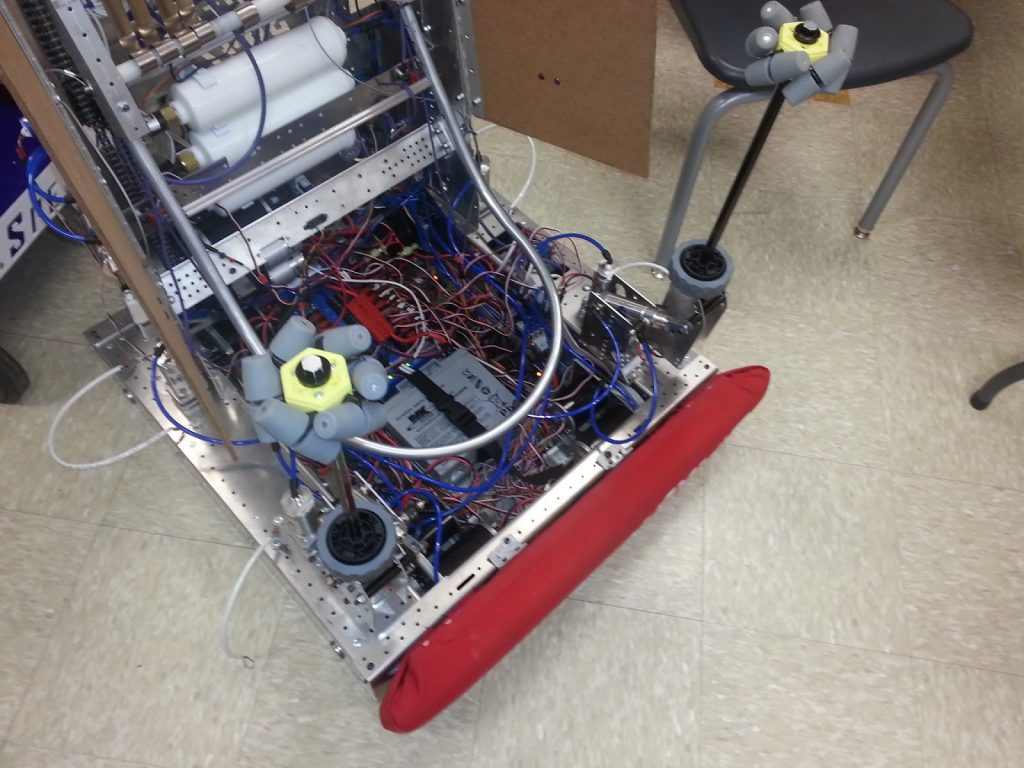
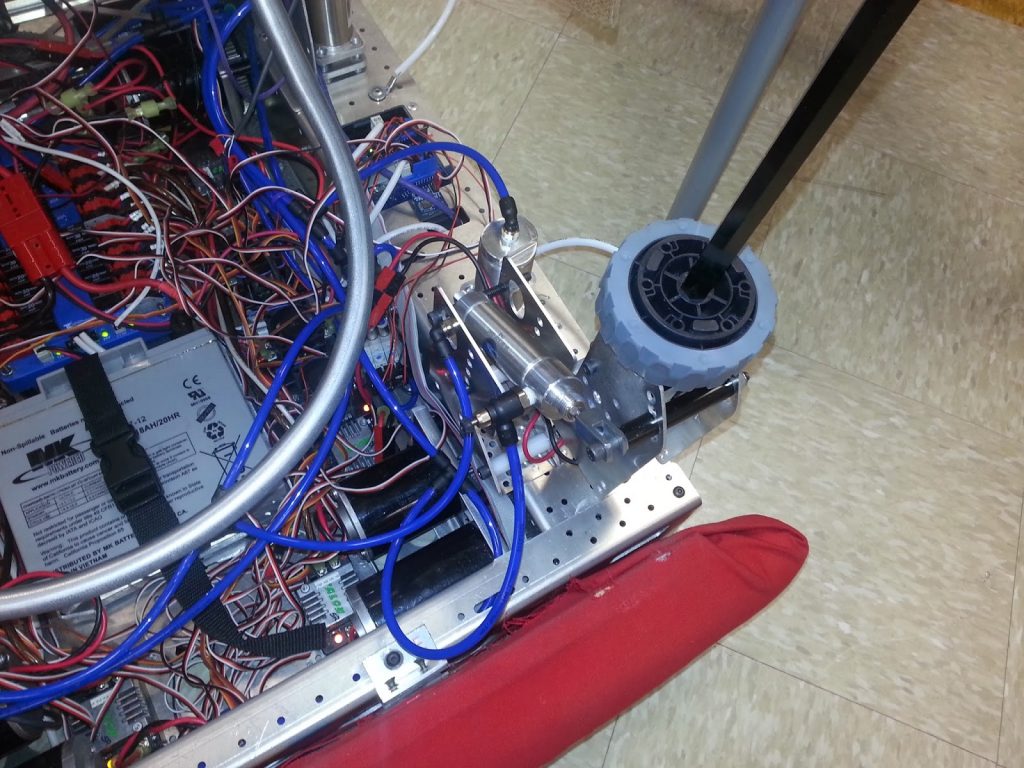
Here is the new collector mounted n the robot. It may look the same but it’s designed not to rotate anymore. We also finally moved to using 775s on the collector which was the plan all along. The 775s have nearly twice the power that the BAG motors do. That puts our motor count this year up to 6 CIMs, 4 MiniCIMs, and 4 BB775s. We really like our collector for a few reasons, particularly because we don’t have to stick anything out past our bumper except for the wheels and hex shaft. We’re still a bit worried about bending the mounts but we are working on ways to prevent that. The pneumatic cylinders are very low on the pivot and allow the shafts to be pushed back very easily which means they don’t bend or break if we run them into a wall. We can also collect when the ball is off center and we can easily eject the ball forward out of our robot to pass or score in the low goal.
“If your actions inspire others to dream more, learn more, do more and become more, you are a leader.” – John Quincy Adams


