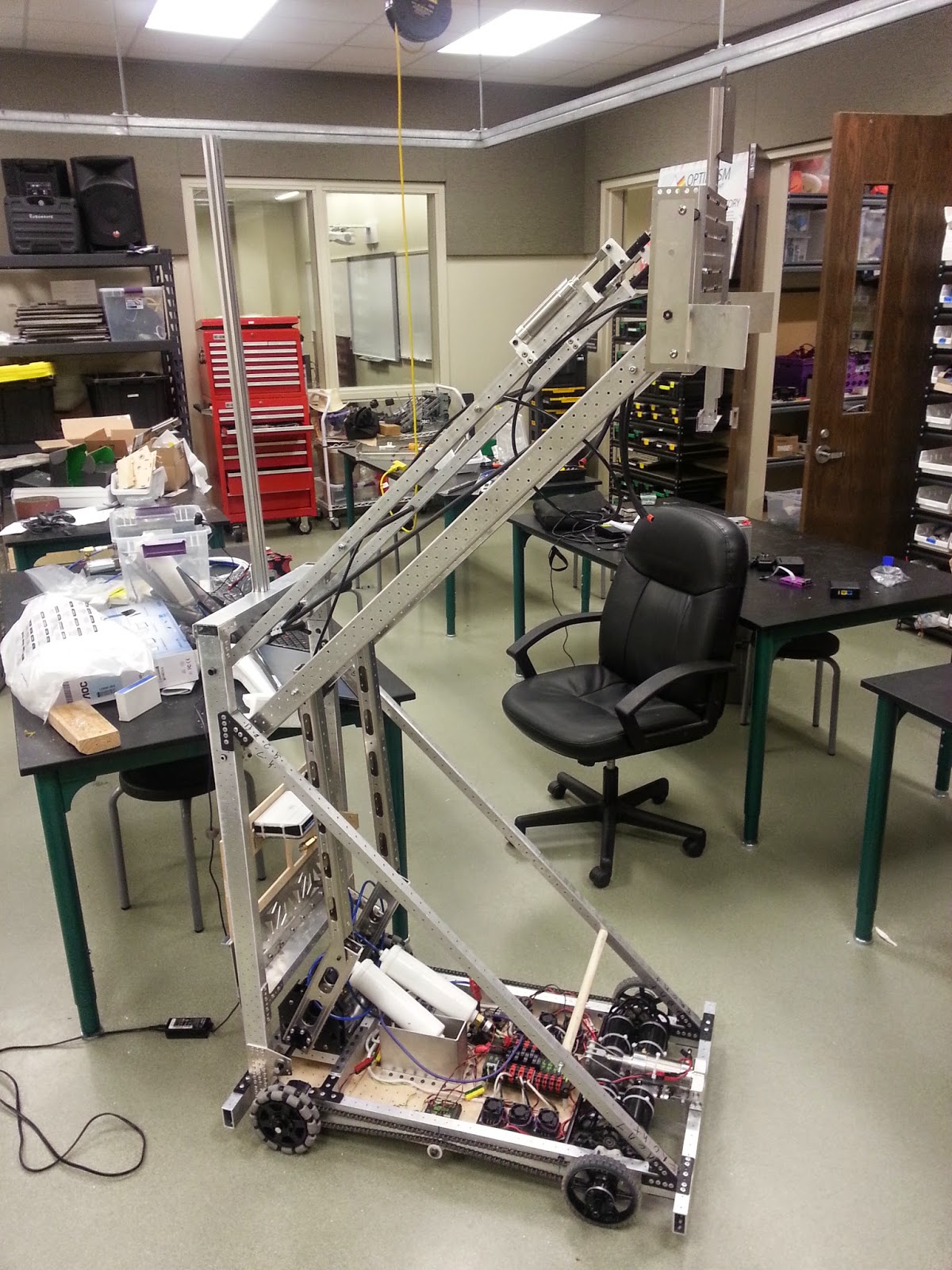
We finally got our cylinders in place for most functions today. We ran out of time to be able to drive test but that should be going quickly tomorrow.

Here’s the full robot as it currently stands. It reaches the full 78″
Here is a close up picture of our H-Drive module, we’re getting code ready for triangle drive soon. (Triangle Drive is the new name we are giving to our drive train just because other people like to name drive trains and we find that funny.)
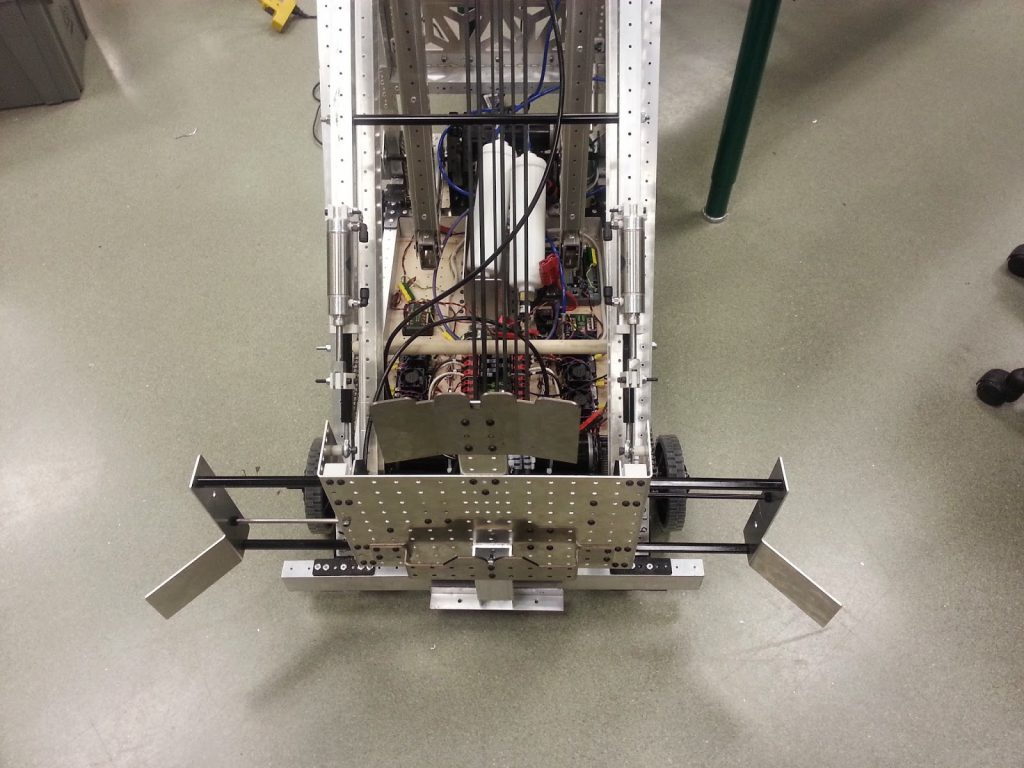
Here is a close up of the collector as it currently sits on the robot. The wedges expand to grab a tote from the wide or narrow sides. After putting it together and just pushing the robot around we identified several areas of improvement. A couple simple ones that just need a few bolts and some Lexan and other’s that potentially involve adding an active wheeled intake to it. We have a couple weeks to iterate before our first event, lots of ideas and hopefully enough time to find the one that works the best.
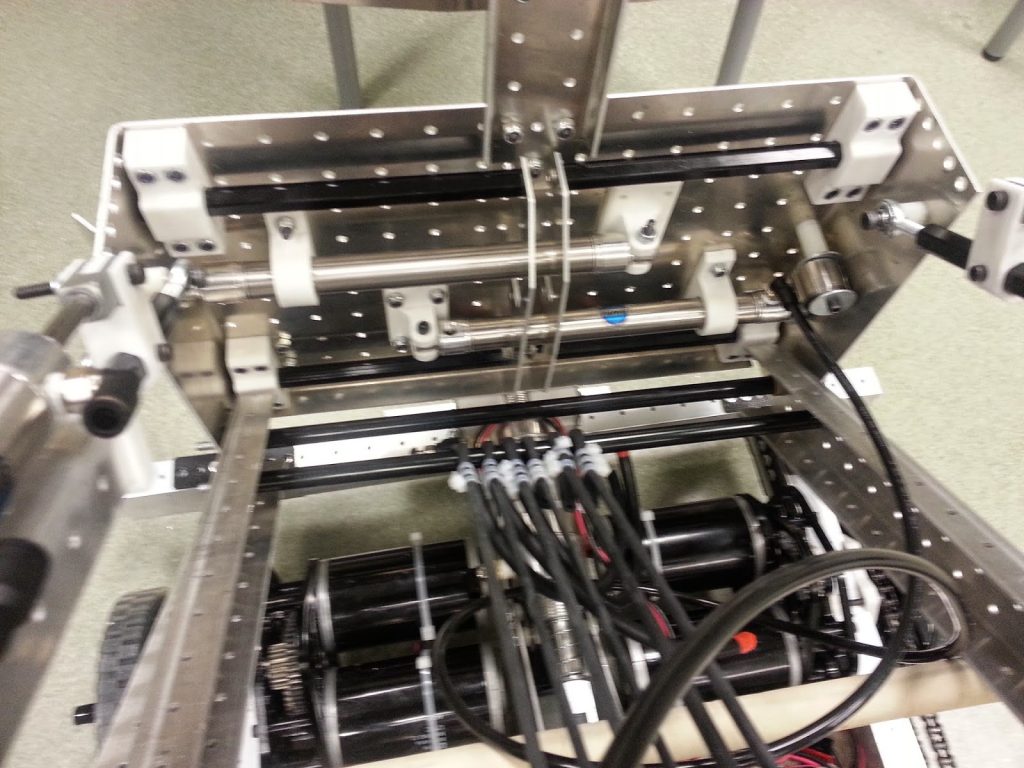
Here’s the back side of the collector, it’s amazing that everything fits. We had to shave down some bolt heads to get the clearances we needed.
We dropped off the competition robot parts at SABS a rim repair shop here in Houston that will be powder coating for us this year. Always nice to get a new sponsor.
– Spectrum
“Whosoever desires constant success must change his conduct with the times.” – Niccolo Machiavelli

