This led us to rethink several of the front runner ideas for mechanisms on the robot.
We had originally eliminated a ground pickup for the gears but after reevaluating it. We realized that the passive intake from the feeder slot will take up a a lot of room and has the potential to be jammed if any balls get caught in it.
Any time you are stopped for loading at the feeder slot is time you aren’t driving back to score. If your intake is good enough and you have a floor intake for gears you don’t ever have to line up at the feeder slot which may be very hard (one of the driver stations on each alliance has to look through an airship to see it).
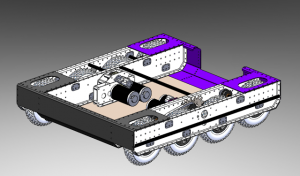
We are also looking at our drive train again to make sure we are getting the most out of it and that are frame style will be able to adapt to this year’s game challenge.
Intake and shooter prototype CAD models have moved forward.
We will have a larger update tomorrow night after the first episode of the new RoboSportsNetwork show check_in. Please tune in Tuesday night at 6pm CST. We are one of six featured teams that will be sharing our FRC season experience with you live each week.
https://www.twitch.tv/frcgamesense
– Spectrum
“We did it because we cared, because when you realize how well you can make something, falling short, whether seen or not, feels like failure.” – Jony Ives
Source: Spectrum