We wired up our wooden chassis today and have it driving around. It’s not the best prototype since it is far less rigid then the real robot will be, but it does give us some idea of how our drive train will behave.
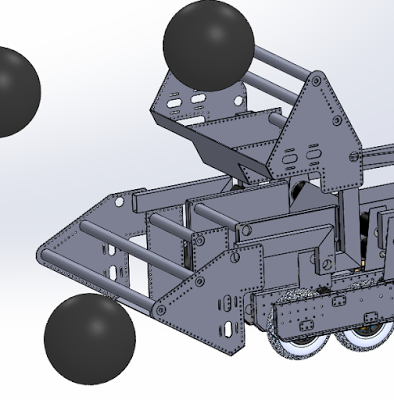
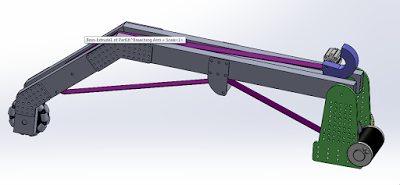
We also have been CADing on our intake geometry and our breaching/scaling arm as well.

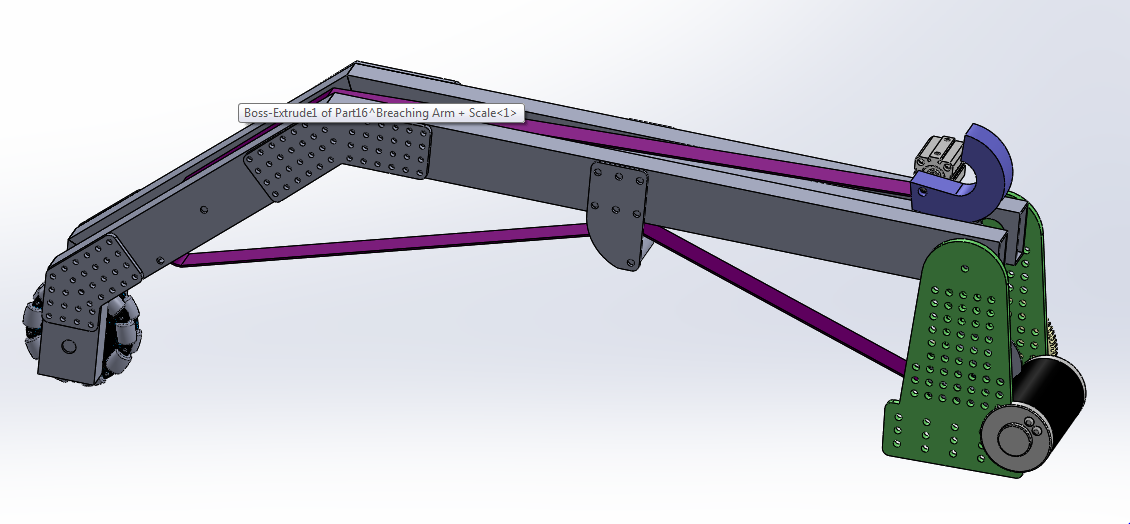
The prototypes for these should be up and running this weekend.
– Spectrum
“It’s much easier to add some features, increase your network, get some itemized tasks done. Who wants to feel failure? We opt for more instead of better. Better is better than more.” – Seth Godin

