We worked out a fix for our bridge device but we still haven’t tested it.
We have tip bars in place in case we fall over so we don’t damage our shooter motors or signal light.
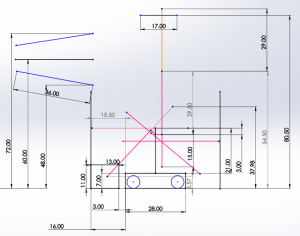
We made a setup to be able to test ball velocity and exit angle from the robot, we should be able to use it at the scrummage to get good data from our robot. We know what the shooter wheels are doing but we don’t know how much of that velocity is getting imparted on the ball and at what angle compared to our compression bar.
We have been doing wire management for the last few days and it’s coming along pretty well, it should be about finished tomorrow.
The programming team made great advances. We now have the beagle bone taking data from our IMU and sending it to the cRIO. This will allow us to know our pitch, roll and yaw. The Beagle bone will also be doing the vision processing in the near future. We worked on a couple other control loops today including our drive base brake. The robot now has a setting where it will prevent the drive wheels from turning. We haven’t been able to test it with another robot but we break traction with the tile floor before the wheels ever spin. This should give a nice stable platform to shoot from.
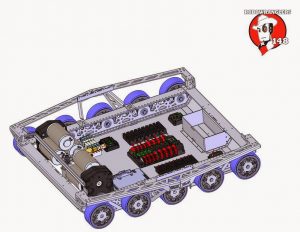
The copy bot is coming along nicely, getting it wired is going to take some time but the mechanical systems should be about finished this week
We still have some work to do on the bumpers and our body work. It’s nice that we have time to figure out where our decals go before competition.
– Allen Gregory
“Truth is ever to be found in simplicity, and not in the multiplicity and confusion of things.” – Sir Isaac Newton