We’re not sure if you call it a redesign when you never really started designing the first option. Today’s design meeting led us back to our priorities of scoring cubes as fast as possible. Time is points in this game and the faster you can score cubes the more matches you should be able to win.
There are 4 distinct cube scoring areas for each alliance.
- Exchange
- Your switch
- Scale
- Opponents switch
Three out of the four tasks are better suited to a shorter robot that can pick up cubes on one side of their robot and drop them off on the other at 2 different heights. Stopping your opponent from owning their switch is just as valuable to you as it to own your own switch since it’s a plus 1 point differential for every second you prevent them from owning it.
So having a shorter nimble robot that can score quickly in the 3 short zones while still assisting with the scale is a valuable robot for any alliance.
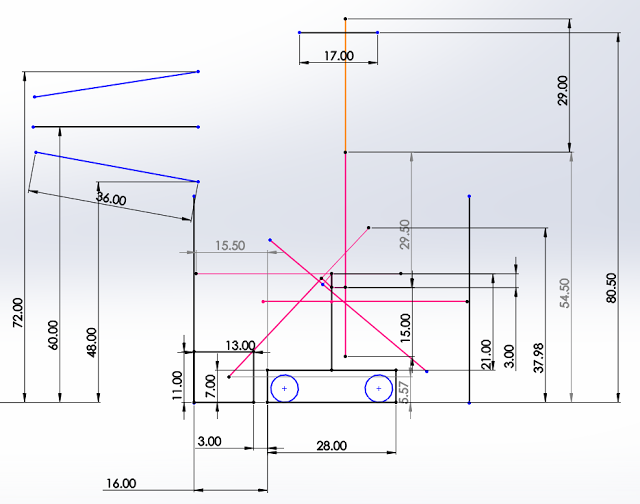
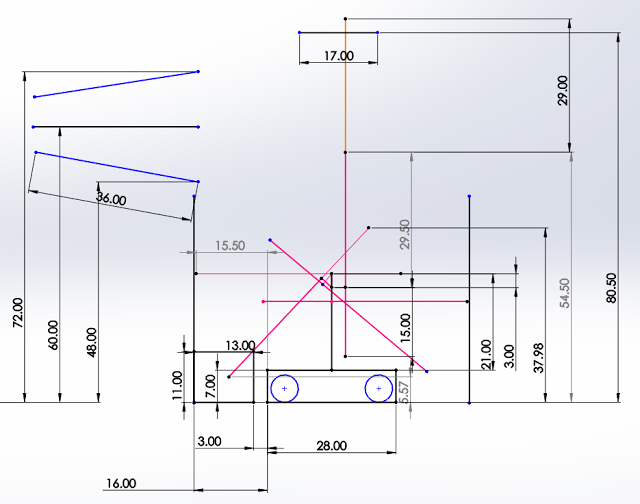
Here is a quick Solidworks sketch that shows how a robot might be built without a traditional elevator to complete the low tasks efficiently while still being able to put cubes in the scale. This design is heavily inspired by previous season robots from 233 and this past pre-season robot of team 2168.
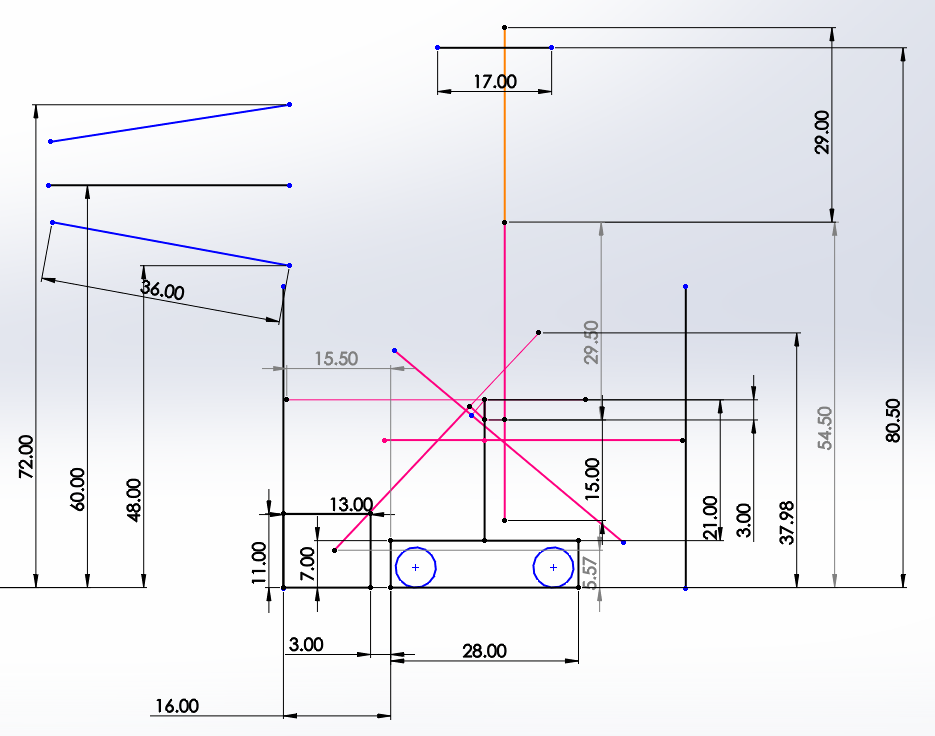
All the dimensions haven’t been worked out yet but this gives an idea of a possible configuration. The 5 pink lines are 5 different positions of a retracted arm. The orange line shows an extended arm. In the full retracted position this arm doesn’t break the 16in frame extension rule and the only time you need to extend is when you are pointing almost vertical to be able to eject a cube into the scale. We may also experiment with being able to shoot cubes into the scale as well so we can be faster and not have to extend every time we place a cube in the scale.
The current thought is we can also get away with a smaller frame with this design. Somewhere around 28″*24″ instead of the full size 33″*28″.
Clamping a partner
This new robot doesn’t easily allow an integrated elevator/climber solution (not sure any elevator/climber is going to be that easy) so we need a new way to try to climb with our partners in nearly every match. JVN and the Robotwrangler’s Hierarchy of Climber Types is a great read about the potential various different climber options. Our original Tailgate climber was a 13 on the scale. It relied on our partners driving on to the right spot for us to lift them and us both up. Our new idea is to try to go one up on the hierarchy and be a “14. Help-A-Fridge Climber” where we are able to clamp onto a partner robot and bring them up the scale with us. This would also let us potentially be something similar to a “7. Versatile Basic Climber” where we clamp on to our partners and they climb us both up.
The idea is to have fold our forks that we drive under a team and then a top clamp that we are able to clamp down on a partner.
Vacuum Cube
– Spectrum
Efficiency is doing better what is already being done. – Peter Drucker
Source: Spectrum