Climbing is incredibly valuable
If you are thinking about which tasks on the field to do, climbing is the most beneficial after only being able to drive successfully around the field and over the small barriers.
- At 25 points (20+ over just parking), it is worth ~7 balls in the inner goal or 20 balls in the low goal.
- It can happen very quickly at the end of the match, leaving you time to do other teams like score balls, feed balls, & play defense.
- It is points that only your robot can get. Your partners can pick up and score balls that you don’t, they might be able to use the control panel to score points, but the 20+ points for you being off the ground requires you to be there.
- If you and one other person on, your alliance can climb and balance your alliance receives a ranking point.
Control Panel Tasks are less valuable
- While there are a lot of points (35) associated with these tasks. Your alliance is required to score a lot of balls before these tasks ever become an option for you to get points. (29+ and 49+ balls) These ball counts will be rare in qualifications matches (and probably playoff matches as well) at many events around the world. You can be the best control panel robot in the world, but if you can’t score enough balls to charge the 2nd and 3rd phase, you’ll never be able to use your skill.
- Even if your alliance is able to score enough balls, only one member of each alliance is needed to complete the tasks. Strongly consider where that robot should be your team, or if this is a task, you can leave to another member of your alliance.
Building Field Elements
We have started building our field elements. Working to make sure we can interact with our team elements in similar ways that we will be able to interact with the real field.



Robots that inspired us today
2006 Robots – 111 (Rack & Pinion Hood)
2012 Robots – 33 (linkage Hood, CD7 Intake, and J shooter path), 118 (intake only has grip in the middle)
2013 Robots – 1986 (Climber), 254 (climber)
2016 Robots – 195(scissor lift), 2056(climber)
2017 Robots – 971(rack hood), 33(accelerator rollers), 5803 (ball path)
2018 Robots – 33 (double reverse 4-bar), 125 & 1323(buddy climbs), 2056 (forks)
2019 Robots – 3940 (floating roller on intake)
If you’re looking for some inspiration, here is a good place to see photos of some Aim High 2006 robots.
Pictures – http://www.firstrobotpics.com/?page_id=49
Sketch of the Day
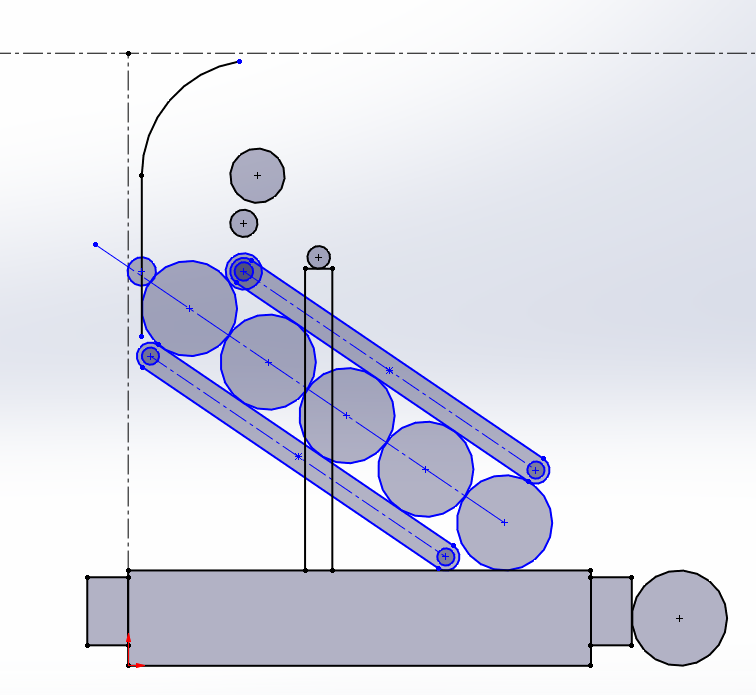
– Spectrum
Source: Spectrum

