Block Robot Update
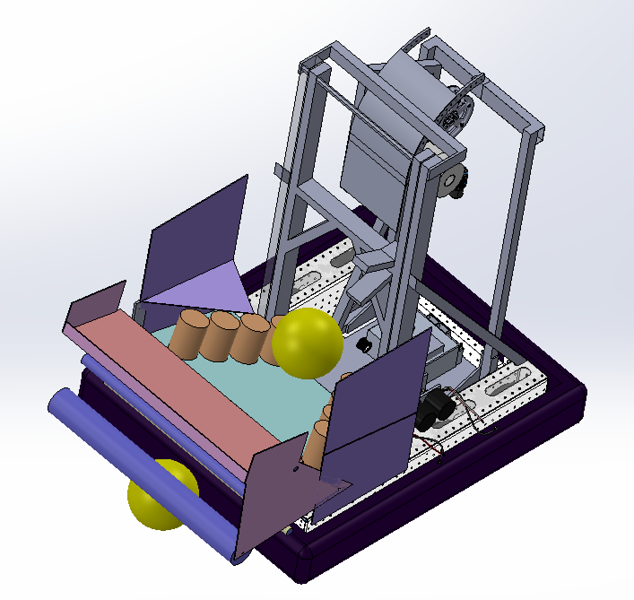
The new intake plan, allows for balls to rapidly be brought into the robot with a wide intake, and set quickly into the tower using a powered V similar to prototype videos from FRC#6135, FRC#4481 and FRC#95 . We plan to prototype some variations of this idea by adding a central channel for balls to rolls straight down and possibly a powered belt to move balls towards the tower belting as well. We will test various options for the side conveyors/wheels and also speeds and direction changes.
The tray on top of the intake is designed so this robot would be able to load from the human player station with the intake down. That should allow us to intake balls on the ground and then quickly get any remaining needed balls from the loading bay when drive in.
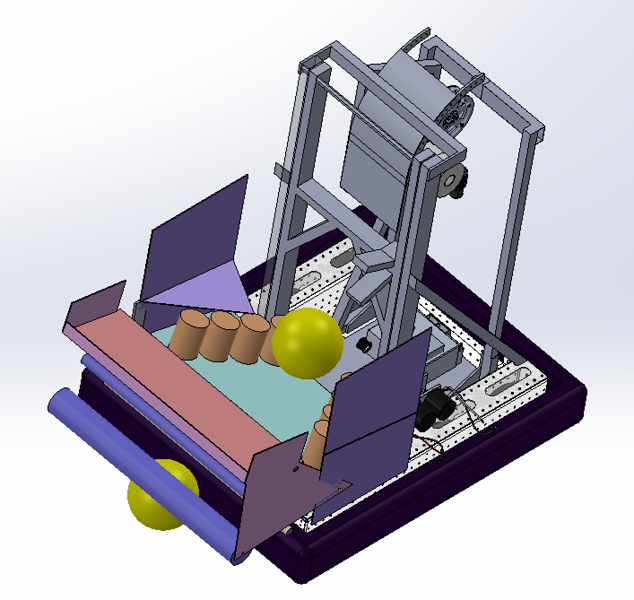
When retracted the intake acts as a cage around any balls remaining in the funnel to not allow them to bounce out of the robot as we drive over the boundaries.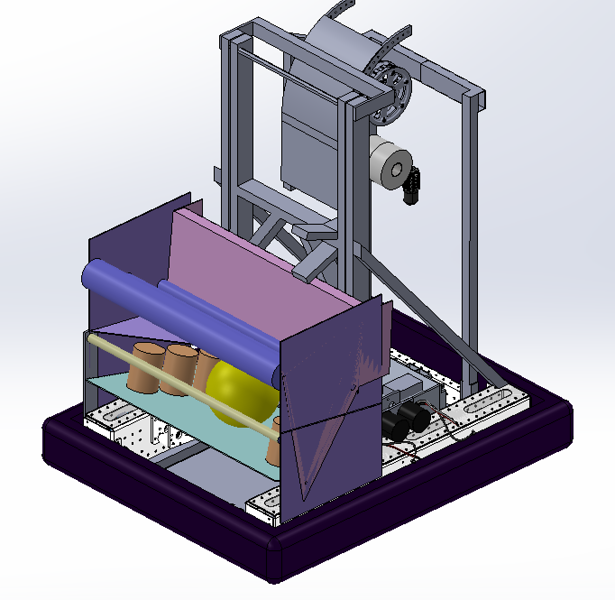
We have prototypes of these systems under constructed and will post video and photos when they are operational.
Spectrum
Source: Spectrum