Today was our first design review. We have seen the 72 hour builds, prototyped a little, and played a human version of Aerial Assist. We think we have a good understanding of the game. Here is how we break it down.
Need:
-
Drive
-
Speed
-
Roll ball out of robot on ground or into low goal
-
Sturdy/Rugged
-
Catch from inbounder / Collect from Human Player / Receive Inbound
-
Hold the ball – securely enough to drive around
Want
-
Pushing Power / Torque
-
Agility
-
Bouncing Ball Control (rebound)
-
Catch well from other robots
-
Shoot a Pass/Lob Shot
-
Variable Power Shooter
-
Ground pickup
-
Lob to Human Player
-
High Goal Score
Wish
-
Strafe
-
Shoot across a zone (lob from back over truss)
-
Shoot from zone line (18′ shot)
-
Shoot from the wall
-
2 ball auton
-
Eject ball on power off
Why bother?
-
Brake (mechanical)
-
>5′ extension…
-
Jump
-
Turret
-
Scissor lift…
-
Ground pickup from sides
-
3 ball auton…
There might be more aspects to the game but these are all the ones we covered. We’ll be dealing with the programming side of things a bit later.
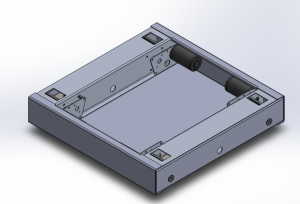
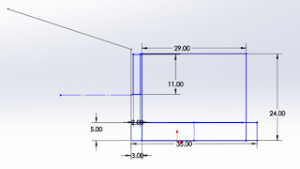
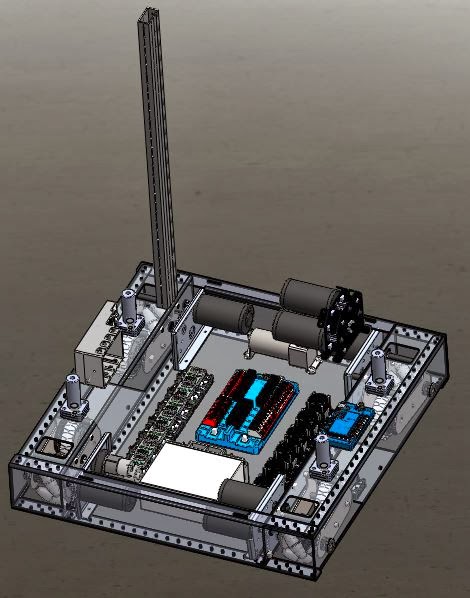
Today’s update is a picture of the current state of our CAD Model. It’s still rough, but the drive train is coming along very nicely. We are working on the electronics layout, as well as fitting everything else into the robot. (All the CIMs are just place holders, there will only be 6 on the real robot.)
– Spectrum
“Start by doing what’s necessary, then what’s possible, and suddenly you are doing the impossible.” – St. Francis of Assisi