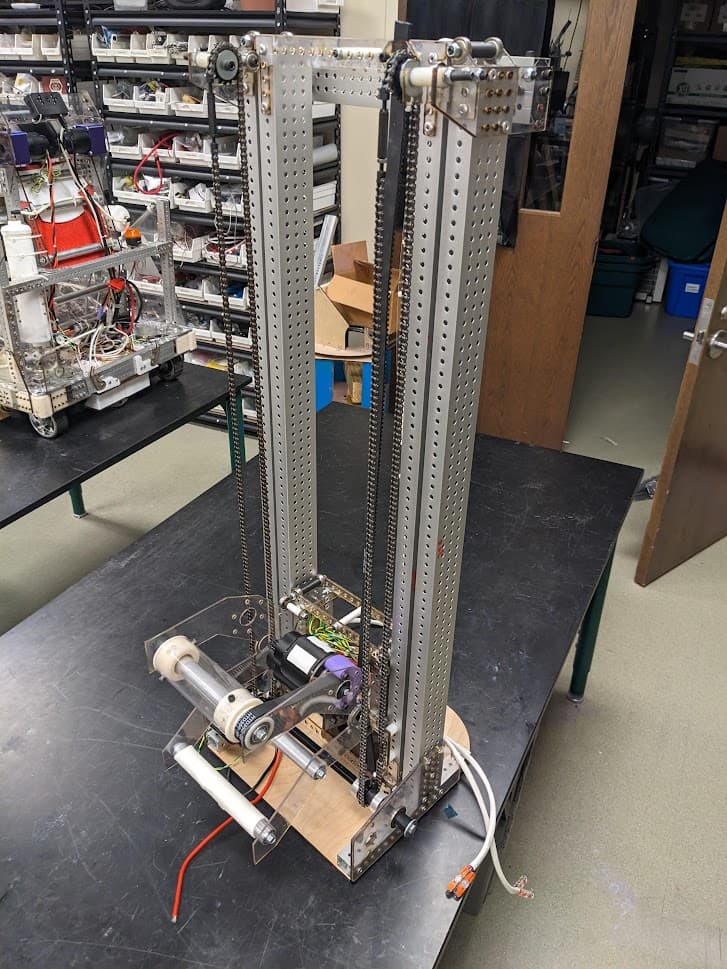
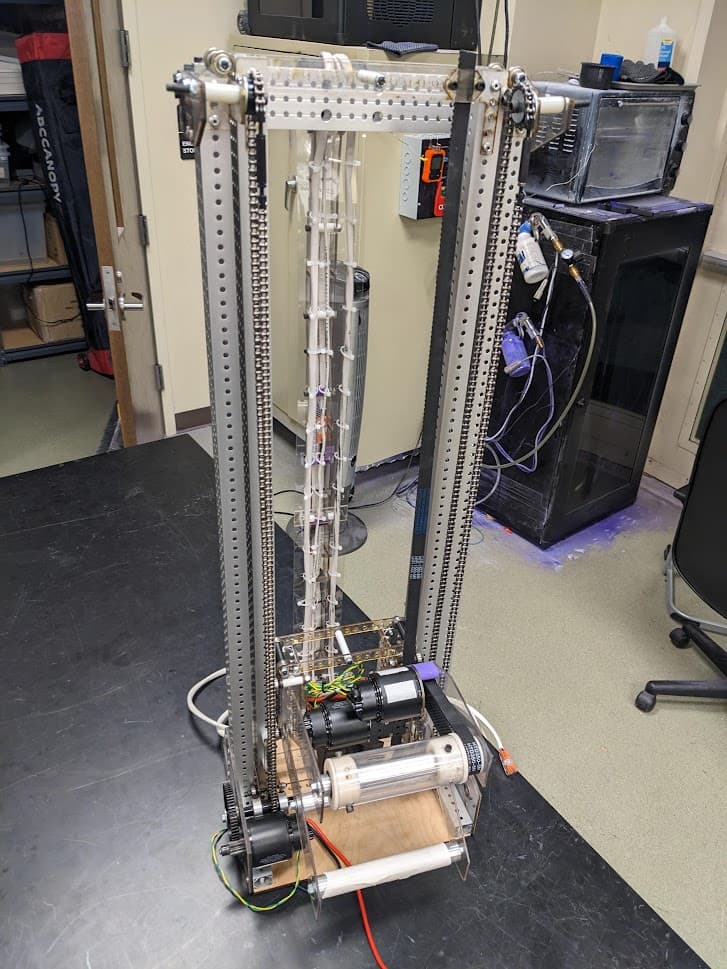
We also designed an elevator during the fall, like many many teams. Ours wasn’t designed specifically to be a model of how we could build a competition elevator in 2023 if needed. It was designed to experiment with a few different elevator ideas and be a useful training tool for robot assembly.
Onshape Link
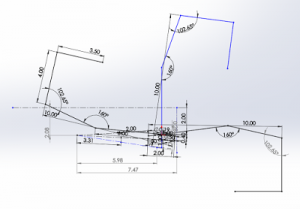
This elevator can either be run in a cascade setup or, as modeled, set up so the first stage motor and the carriage are decoupled and can be controlled independently. This could let you have a starting position with the carriage at the top of the robot or allow for specific over-the-back designs. You can also gear each stage for different speeds/power. You could have a very fast carriage used for most of the scoring and a slower 1st stage used for climbing and some scoring.

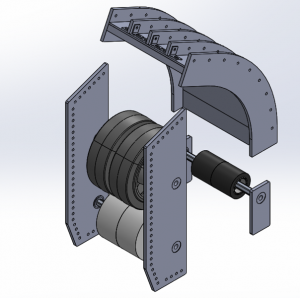
The carriage is raised and lowered by a belt running from the bottom to the top of the 1st stage that isn’t modeled in the CAD and powered by a motor on the carriage. This design took some inspiration from 1114-2019 with the sprocket and chain on the front side of the elevator. This design is also inspired by 971-2019’s thin polycarb cable carrier method.

Source: Spectrum