Today we worked more on our prototypes.
Tote Puller
Here is the working version of our tote puller. This mechanism will be used to retrieve the totes from their starting configuration and move them around. We still have to perfect the tension and position of the surgical tubing.
Drive Train
Our drive train has been modified to be an H-drive consisting of two rear wheels and a large omni wheel on the front. This could potentially allow us to strafe sideways and at angles to align the totes more easily.
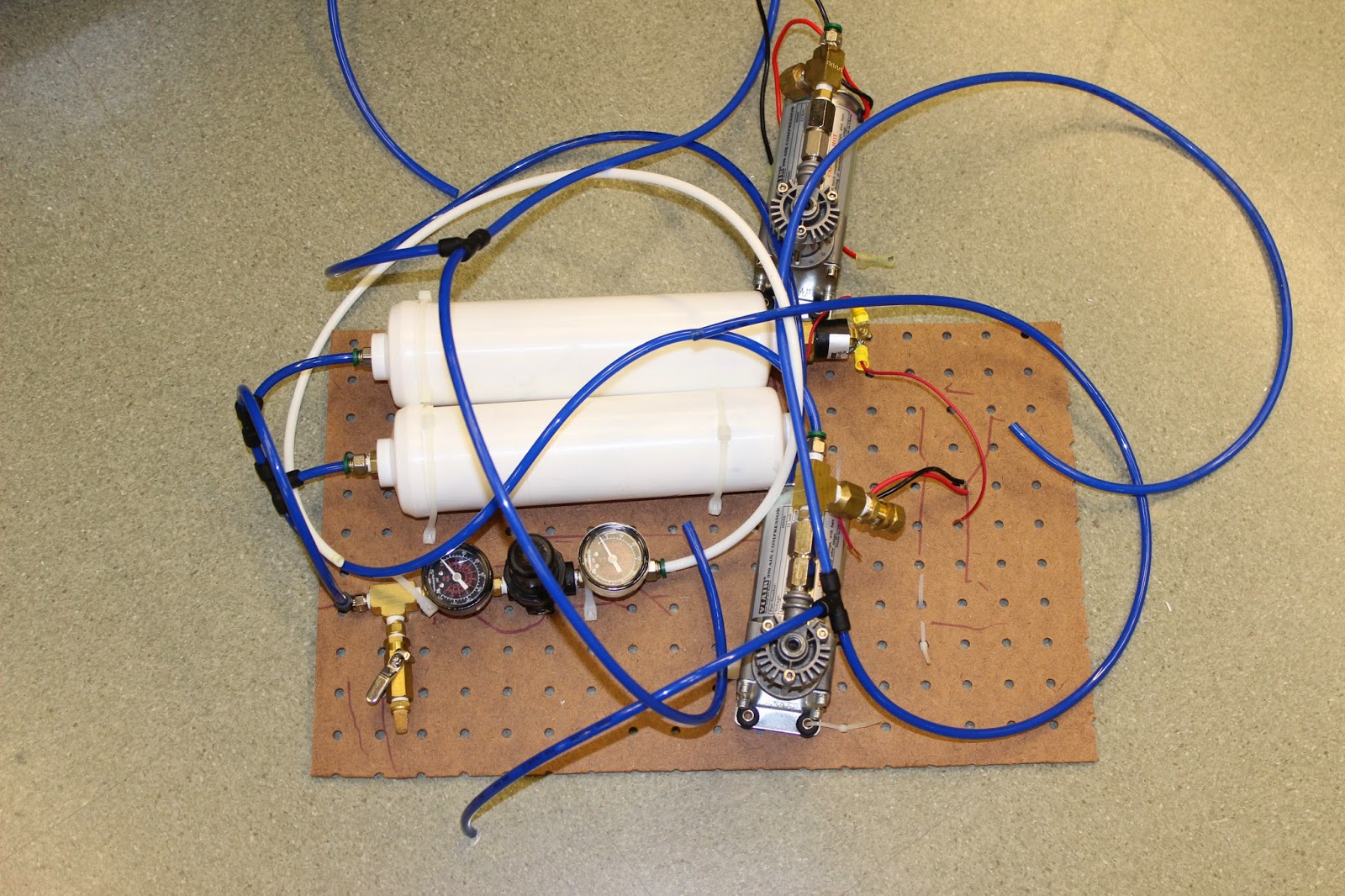
Pneumatics
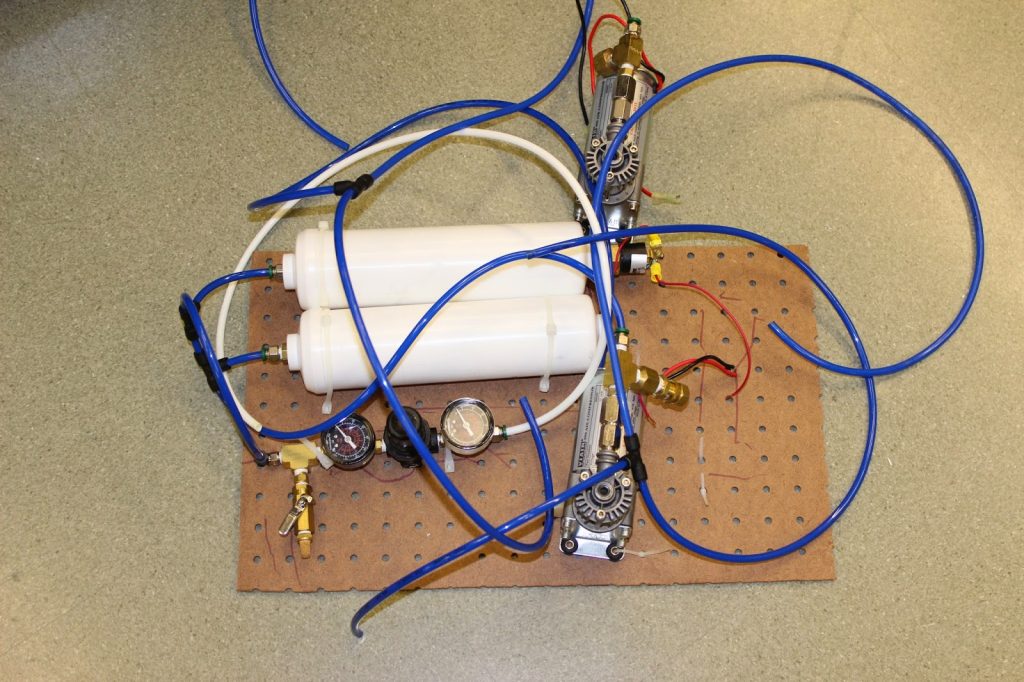
Our pneumatics are ready for testing. This setup is designed to control the lift’s actions.
– Spectrum
“Whatever you can do, or dream you can, begin it. Boldness has genius, power and magic in it.”
– Johann Wolfgang von Goethe

