
We had another long day but we made some good progress. We were even able to mount a prototype of the collector to Violet (our 2012 robot) and drive around a bit to test the collector. It still isn’t perfect but we think that’s our best subsystem so far.

The shooter is still under heavy development. We had to put a CIM back on our shooter to get the mass and acceleration we need into the disc. We are going to test a two wheel (in a row) shooter tomorrow, after the kit bot build day, and see if that solves are distance problem.
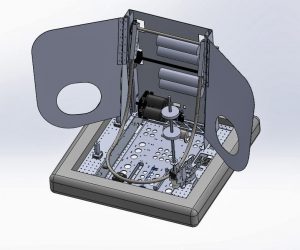
We’ve begun the initial CAD development of the robot. The chassis is going to be VEXpro chassis and it’s an ideal base for the robot we want to build. We’re still getting a little creative with the wheel wells to give us room for collection.
Climbing is on the back burner but we still seem to be talking about it all the time. We’re hoping to find a way to climb (more than 10 points) with the real estate we have left on the robot but that is proving very challenging. We built the prototype of the motorless/actuatorless 10 point hang today.


We still have a lot of work to do and need to get parts to the laser cutter soon if we want to have the needed amount of driver practice for a game like this.
– Spectrum
“We don’t even have all the questions, yet, let alone all the answers.” – Michael Laine

I saw your passive climb idea on Chief Delphi and must give credit- very nice simple idea.