We continued our prototyping today.
The improved roller claw is working very nicely. We’re not convinced that we will even use a roller on our final design but we are still working on improving it as much as possible. We are tuning it to find out as much about the different variables as we can. We want to know what is the optimal roller height, roller distance past the bumper, height of the back bar, downward force to press on the ball, etc. All of these little details will make the final design that much better.
We are pretty far along in CADing our drive train for this year. Here is a quick screenshot from our progress.
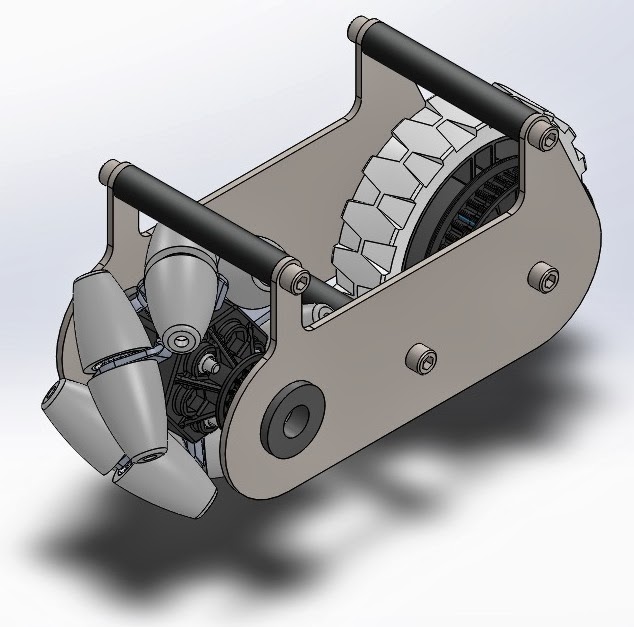
We have posted some of the details behind this design in our 2014 Design Notebook. Our goals is to make it pretty flexible. We believe that catching may turn into an important factor in this game and having the ability to move omni-directionally will make that task much simpler. We also know that there will be times that we need to stand our ground or attempt to move another robot for this reason we are planning to use an Octacanum drive train that can shift between mecanum and traction wheels. We are building in contingency for allowing us to switch from octacanum to a butterfly drive with standard omniwheels replacing the mecanum wheels and also a standard six wheel skid steer drive if we desire.
Several of our other prototypes are still under construction and not ready for even simple tests, hopefully by the end of the week we will have a solid idea of where we want to go with the robot.
– Spectrum
“Do not follow where the path may lead. Go instead where there is no path and leave a trail.” – Ralph Waldo Emerson
