The focus of today’s meeting was to catch people up on our analysis from the weekend and then start thinking about intakes. Every robot this year needs to be able to intake cubes and do so effectively. The best robots in the world will have some of the best intakes in the world.

Functional Requirements
- Grab cubes in any orientation. (3 different ways)
- Grab over bumper
- Securely hold the game piece
- Deposit into exchange
- Integrate with elevator
- Touch it, own it
- Robust can take a hit
- Light weight
- Set cube in switch/scale
- Possibly deposit cube in back of switch or scale
References
We started by discussing a few of the different concepts we thought of over the weekend and looking at previous years examples of those intake types.
- Multi wheeled side compliant intake (Landfill Intake)
- Four Bar side intake (Clapper)
- Bottom and top roller
We then discussed the advantages of each type and made sure everyone had felt the cube and understood what we were trying to do.
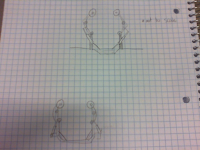
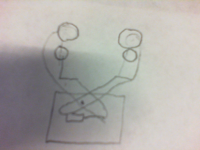
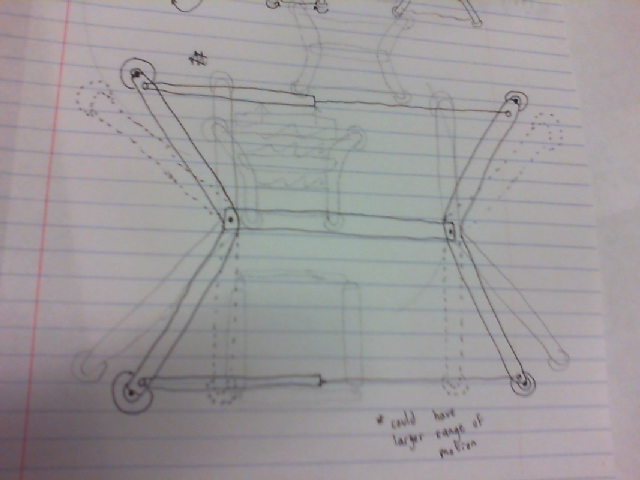
Draw an Intake
We had each of our members draw their depiction of an ideal intake given the information we currently had. The reason for this was to see if we could find any assumptions that we were making about intakes that may not be true.
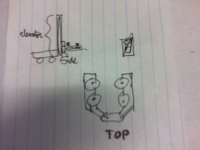
Here are some examples of the sketches we made for cube intakes.

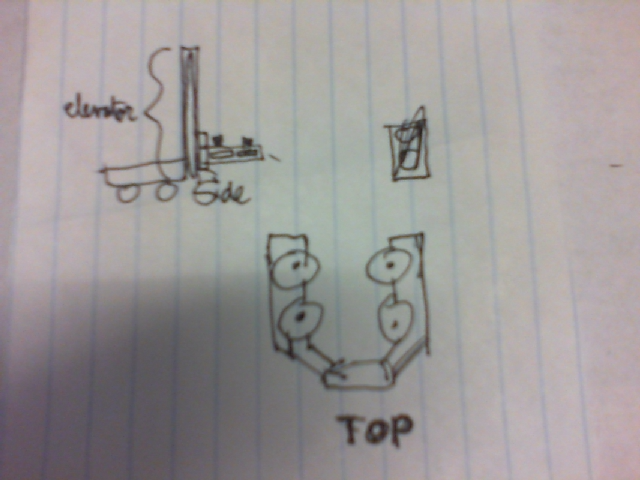



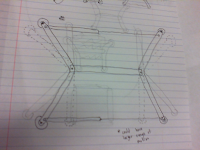
More Designs
Several new designs were created during this process of sketching intakes and talking about assumptions.
- Boomerang intake
- Pivot is between the two sets of wheels.
- Linear compliant intake (Slide Intake)
- Sets of wheels slide on a linear track to add compliance, instead of pivoting
- 3 Sided Box
- Adds the side and top roller together but removes the bottom roller so we can still place cubes nicely.
Other intake notes
- Possible pneumatic punch to help push cubes to the back of the plate.
- Wheels on each side don’t have to be in the same location or same height.
- Stacked wheels to get more grip
- Independent control of each sides compression?
- Pivot doesn’t have to behind the wheels (bomberrang shape)
- Centers to a back holding place instead of the wheels in front centering. You may get lopsided without it.
- Conveyor / belt between wheels or only a convener?
Design Parameters (Variables)
- Speed of the wheels
- Motor types, gearing
- Area of acquisition (how big can it open or how wide are the rollers)
- Number of wheels
- Type of wheels
- Compliant wheels vs solid wheels
- Different types of rubbers and materials
- Do nubby/studded wheels grab into the indents of the cubes?
- Entrapption Stars instead of wheels? In addition?
- Positions of wheels relative to each other
- Distance between wheels (if they are in a row)
- Different compression amounts for each row of wheels in a set.
- Thickness of wheels
- Compliant distance (how close can each side of wheels get and how far away can they get)
- compliance geometry
- Intake wheels center line distance from the ground
- Different wheel positions instead of straight lines
Next Steps
- Start designing prototypes that allows us to establish the most optimal versions of these intakes.
- Build mounts that allow us to use small wheels quickly in the prototypes and changes their positions.
- These should let us mount multiple types of wheels quickly and easily and also change the wheel spacings using the REV Extrusion and spacers on the VP mounting bolts.
- 24T GT2 pulleys, 60t belts, and 1/2″ hex shafts with shoulder bolts in 3/8″ bearings.
- Could go even smaller with 1/4″shoulder bolts and bearings.
- Designs will continue for the next 3 days and we should be testing multiple intakes Friday-Monday
– Spectrum
“Every skill you acquire doubles your odds of success.” – Scott Adams
Source: Spectrum