Now that sheet metal has been sent out, it’s finally time for us to buckle down and figure out some of the smaller parts on our robot. Among these smaller parts is the plate we plan on using to cut off individual lanes in our three-wide shooter.
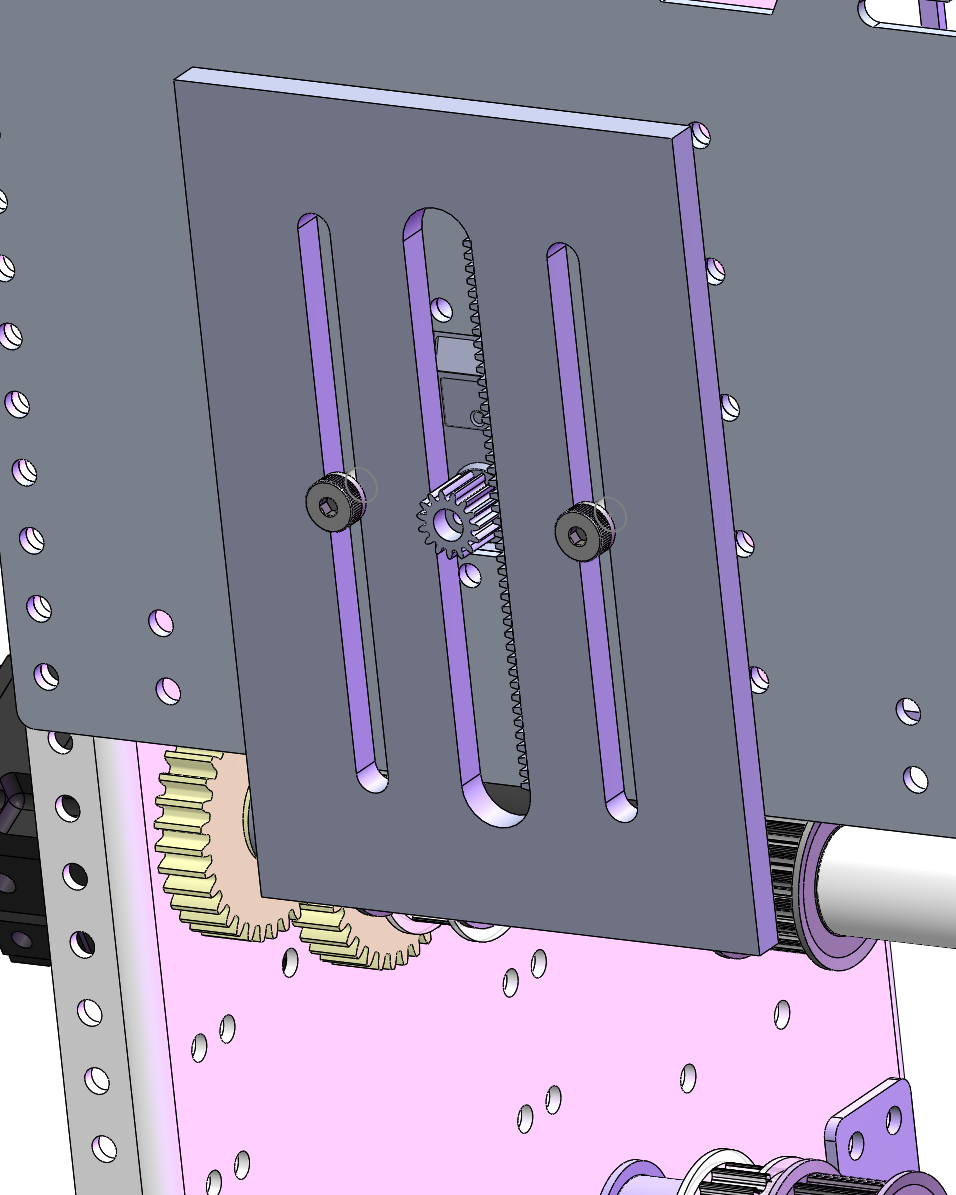
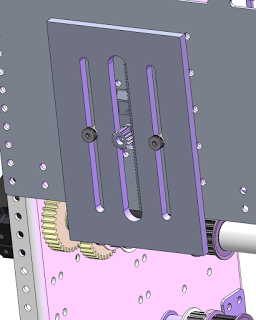
CAD model for said plate
Our plan for actuating this plate was to have it driven by a REV Smart Servo mounted in the inside of our shooter tower via a rack and pinion. This seemingly simple task proved to be the cause of numerous attempts to fix open contours in Solidworks before realizing that rack teeth do not, in fact, use the same profile as gears and are simply trapezoids. With the annoying geometry problem out of the way, the question then arose of how to know what dimensions define these trapezoids. The annoyance was further exacerbated by REV’s use of the metric module to define their tooth spacing instead of the diametrical pitch more commonly used in the imperial world.
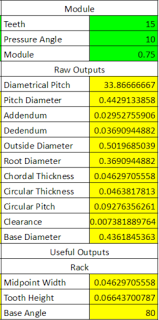
After a number of google searches (including re-learning what such technical terms as “diametrical pitch” even mean), we eventually discovered a useful whitepaper on the Iowa State University website which outlines how to design gear and rack teeth given certain parameters for your tooth profile. After copying their spreadsheet maths into our Master Sheet, we were able to successfully model our rack. A copy of our spreadsheet can be downloaded here.
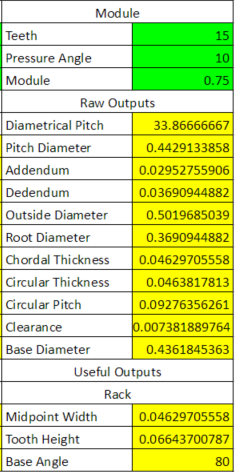
Sample spreadsheet outputs for REV Smart Servo pinion
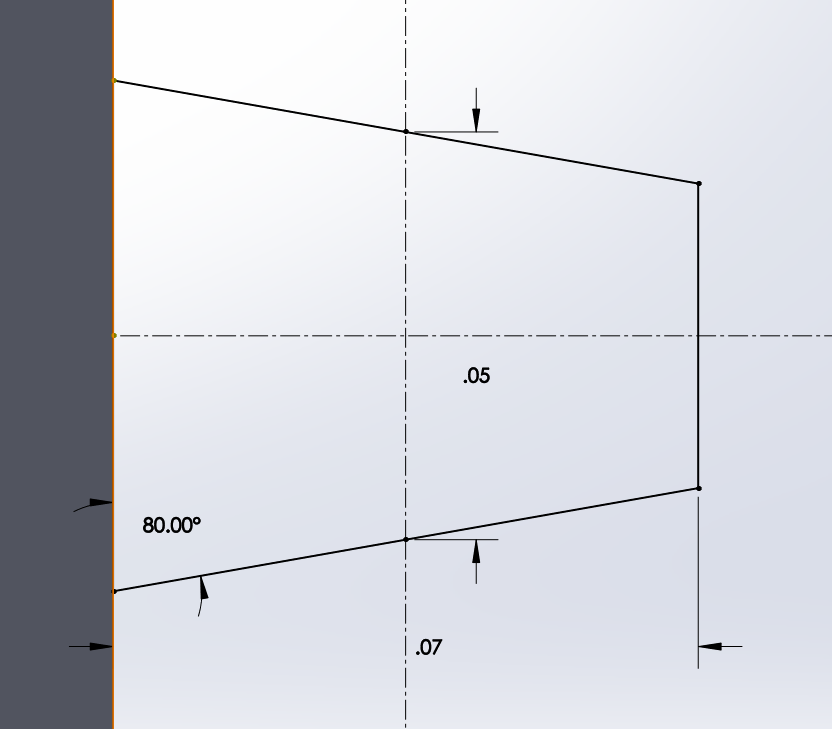
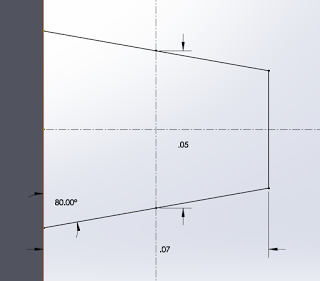
The rack tooth designed from the above spreadsheet data
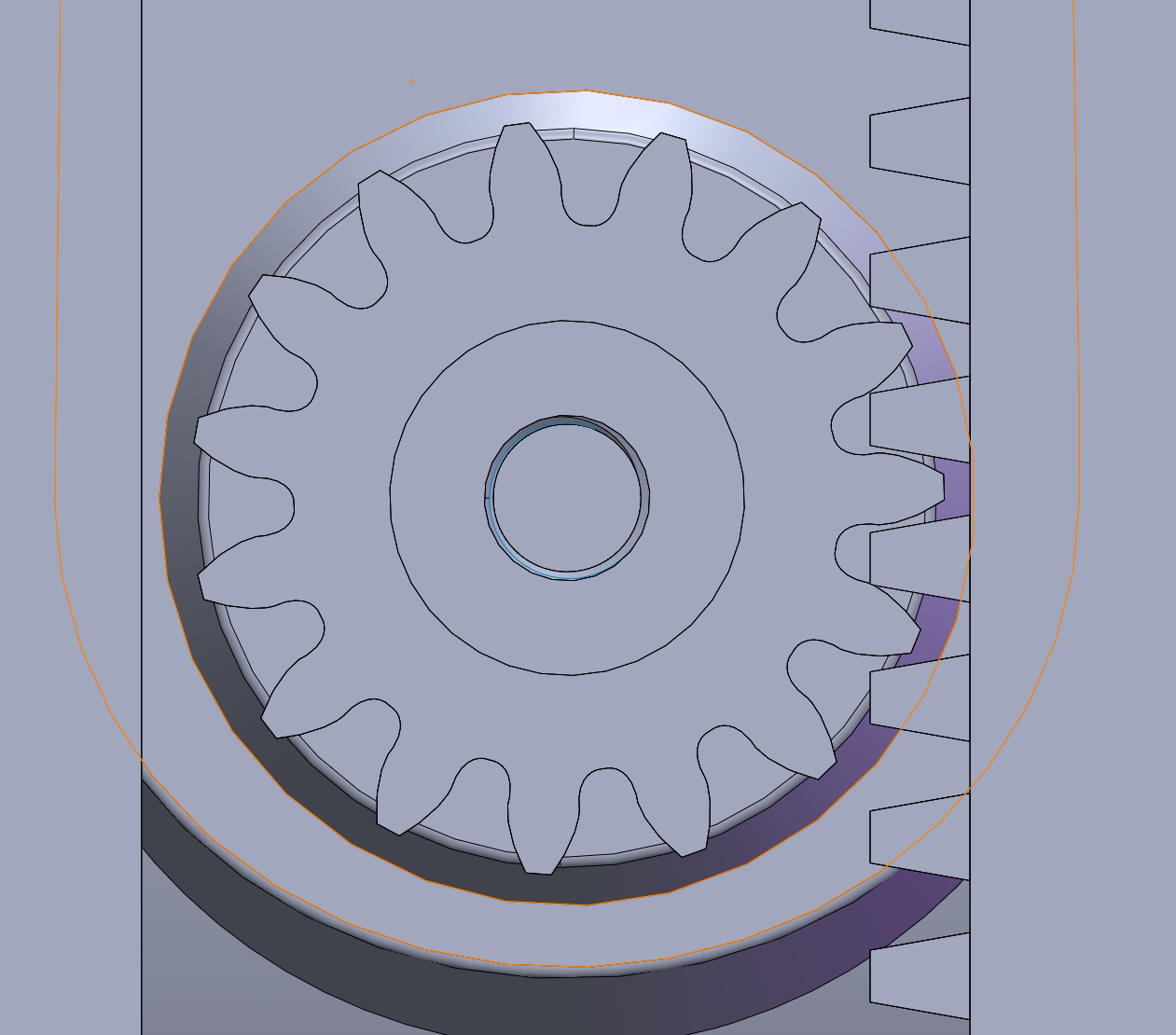
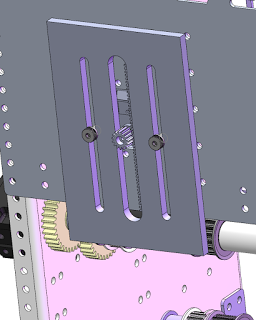
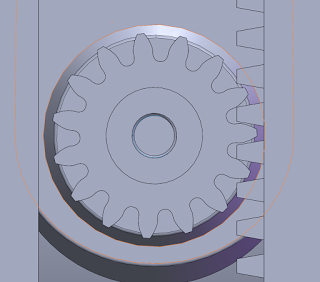
Closeup of rack and pinion
-Will S, Spectrum
“I must not fear.
Fear is the mind-killer.
Fear is the little-death that brings total obliteration.
I will face my fear.
I will permit it to pass over me and through me.
And when it has gone past I will turn the inner eye to see its path.
Where the fear has gone there will be nothing. Only I will remain.” – Frank Herbert
Source: Spectrum


