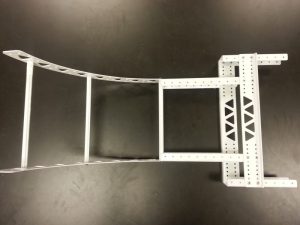
Hook prototypes
We are working through some basic routed hook prototypes to see how the pneumatic fold out will work on the robot. We also hung some sandbags from the wooden one to see where it would start failing first. This is mounted on the back side from the intake version in this case, but the real robot would have the hooks on the same side as the intake but to the outside of it.
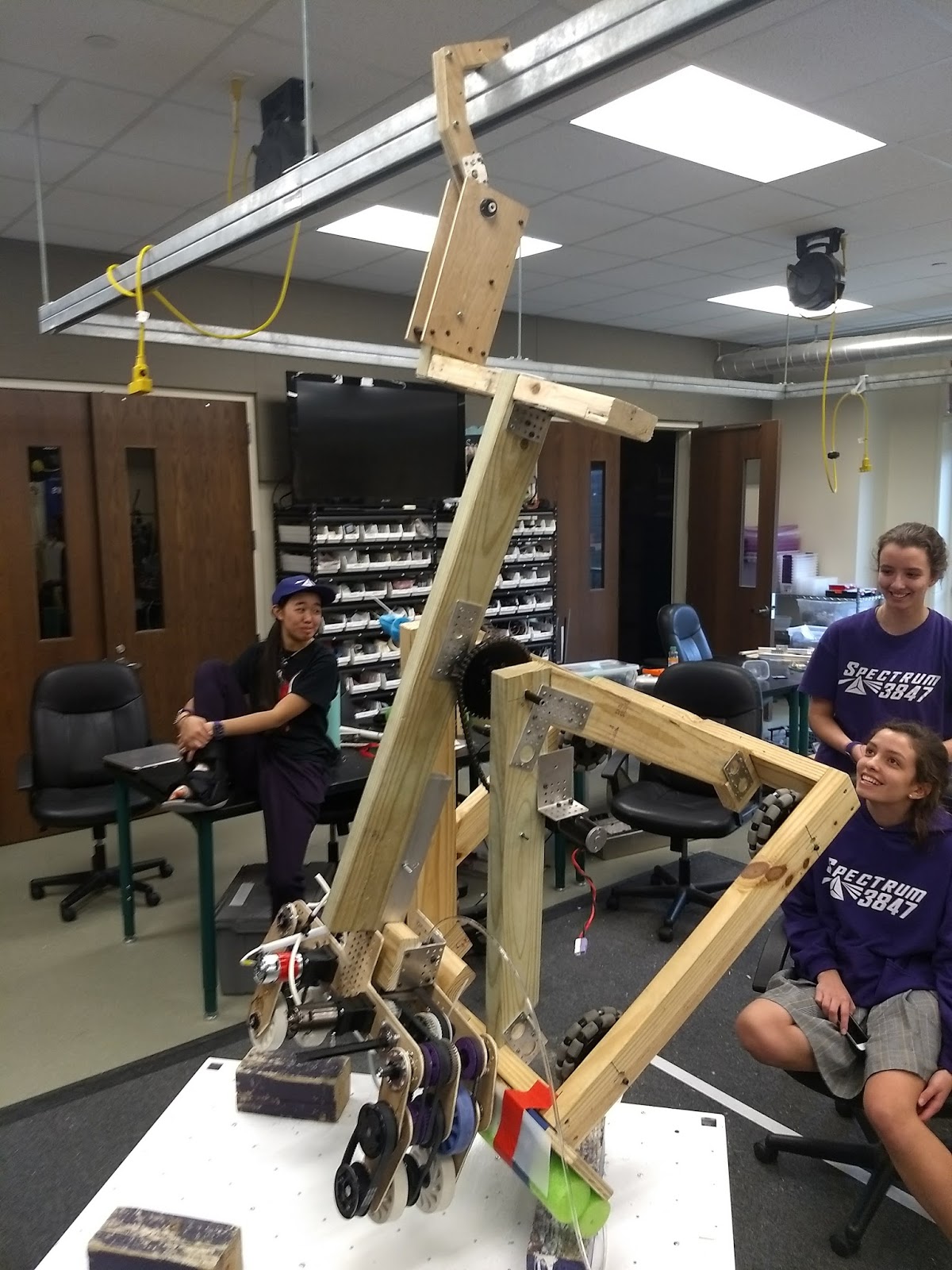

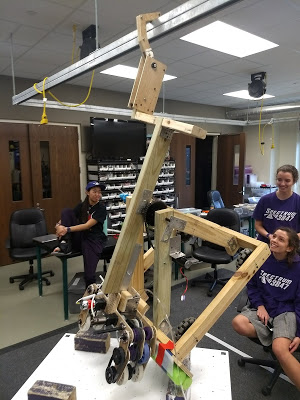
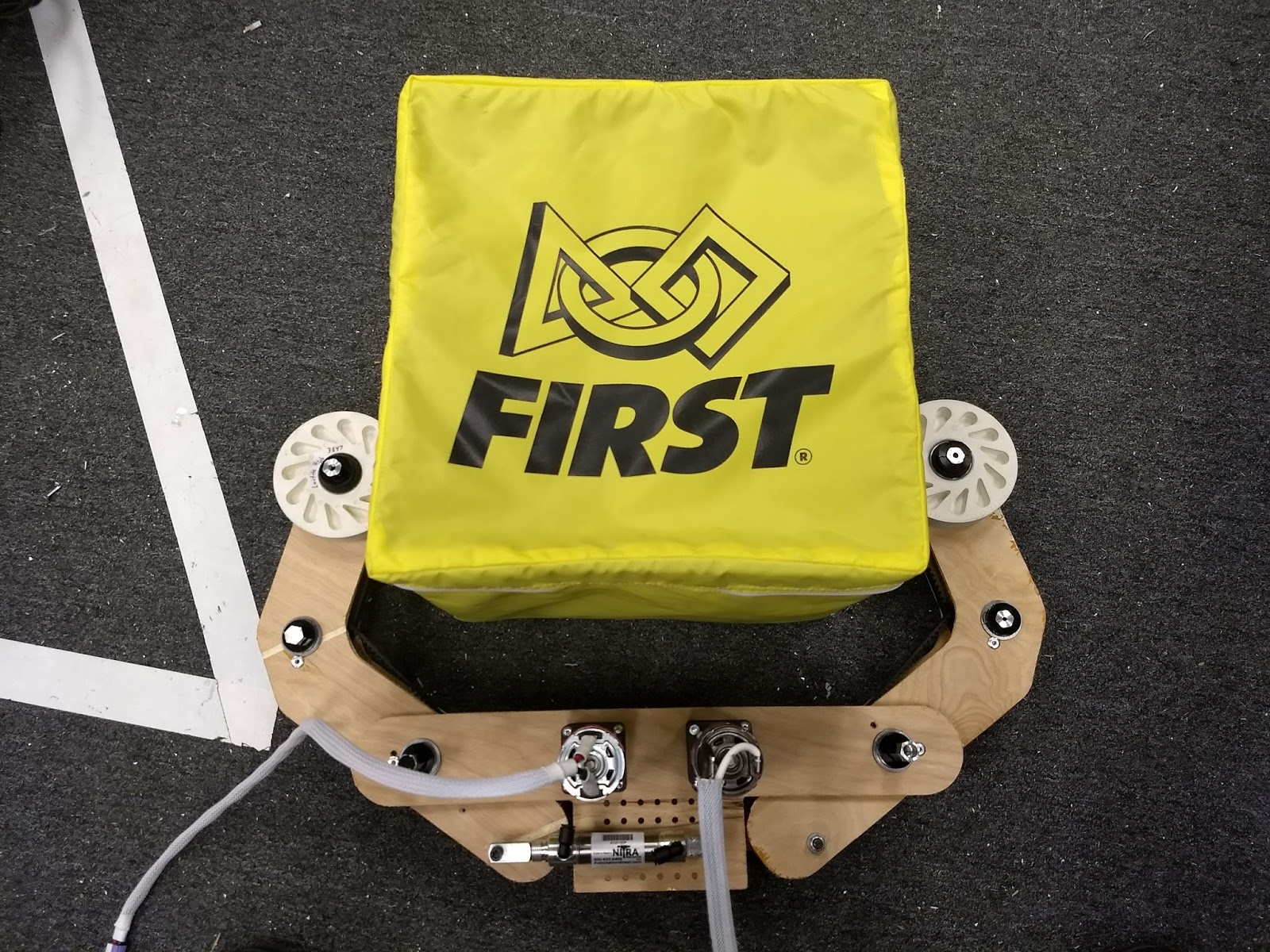
New intake almost ready
Tomorrow we will have the new intake mounted to the fake arm and we we’ll test how well it works. The plan was to dramatically simplify the intake while keeping the contact points similar to our previous intake. This version keeps the motion of the front wheels from our previous intake close to unchanged and leaves room for the cube to rotate behind the wheels that we found was helpful for getting the cube square.
Team Update 6 – G25 Rewrite
Make sure you have read Team Update 6. It includes a major rewrite of G25 in relation to how robots can interact with the scale. This clarifies exactly how teams can place cubes on the scale and how the penalties for moving the scale with your robot will be enforced. Robots that put mechanism above the scale will have to be careful that they don’t lower the scale or hold the scale down with their mechanism.
– Spectrum
“If you can laugh together, you can work together.”- Robert Orben
Source: Spectrum