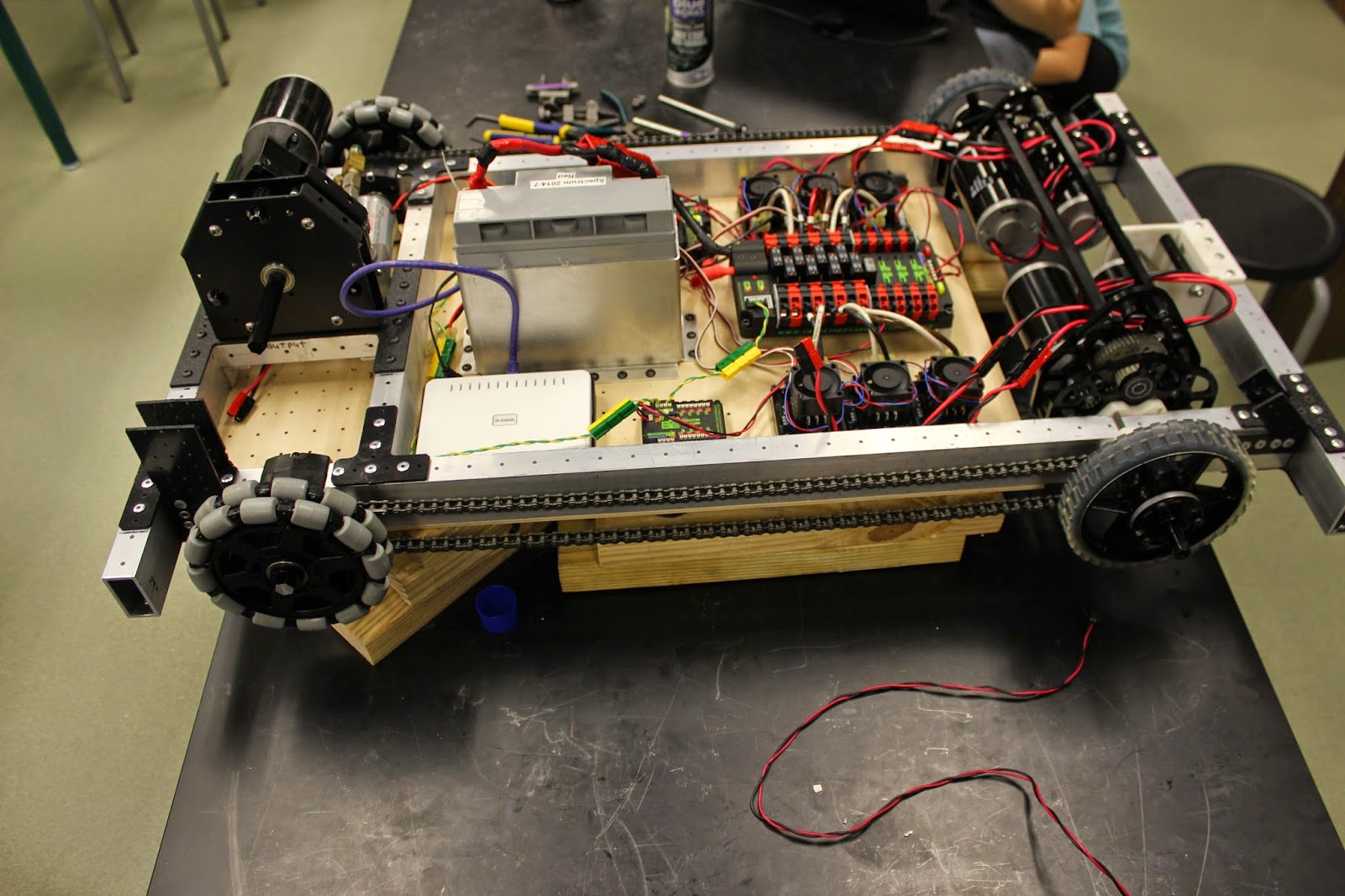
Lots of progress on the practice robot (robot 1) today. The electronics were mounted and wheels were chained together. We never actually got to put it on carpet and drive it around but that will happen tomorrow.
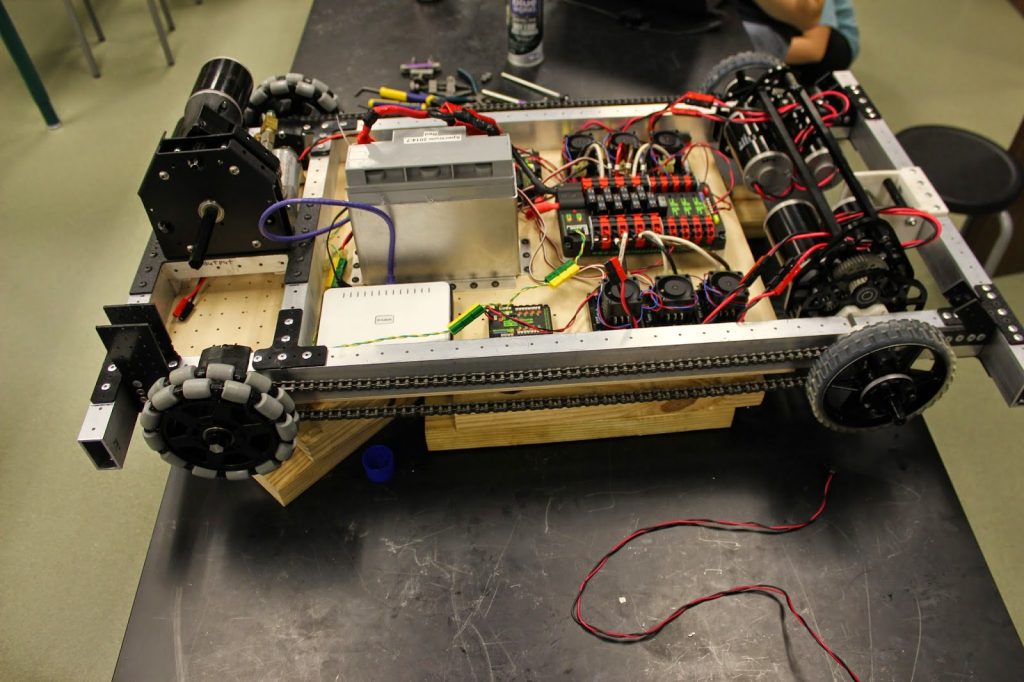
As shown it weighs about 50lbs without the battery. That’s with potentially every motor we will have on the robot. We still need to add all the upper structure, the pneumatic system, plus signage, cameras, sensors, etc.
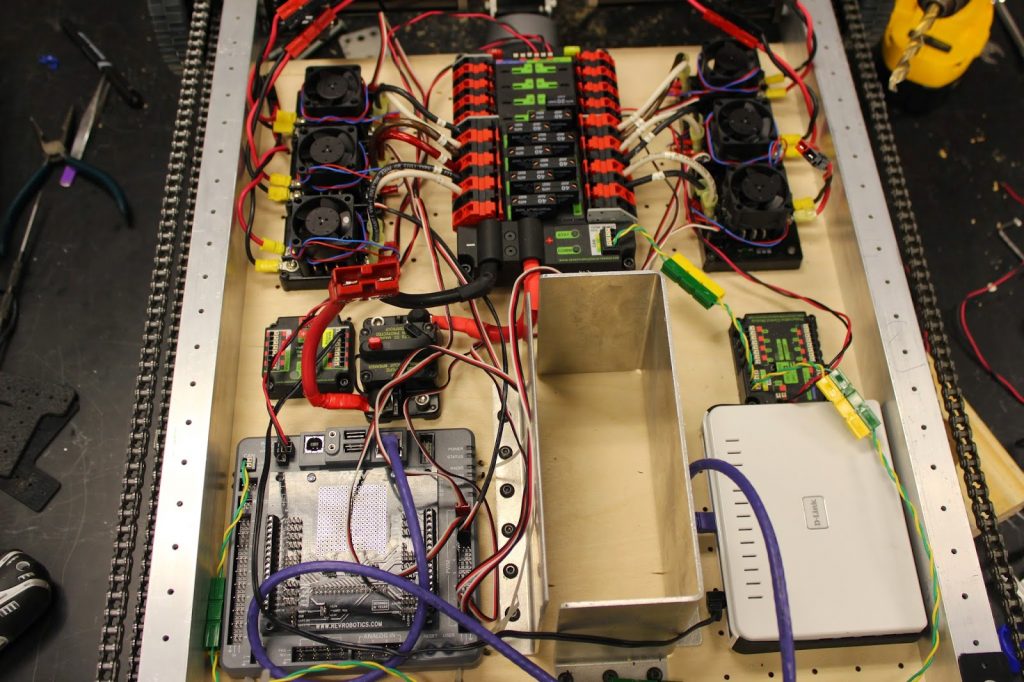
The electronics layout worked out very nicely on the baltic birch plywood. We tested out using some speed taping drill bits and they seem to work very well into the wood. Most of the electronics are bolted down to the threads we drilled into the wood. We also have zip tie holes drilled for every part if we start to notice the threads breaking out of the wood at any point. So far we really like the 1/4″ baltic birch belly pan.

Above is a picture of our arm gearbox. It’s currently a CIM and MiniCIM but we might got with two CIMs on the real robot. They are both fed into 49:1 versaplanetary gearboxes and then finally a 11:84 tooth reduction.
– Spectrum
“The optimist sees opportunity in every danger; the pessimist sees danger in every opportunity.” – Winston Churchill

