We’re getting closer to a final design. We have prototypes of most of the subsystems underway. The collector prototype was able to run today powered by a drill. We were able to easily suck up balls and roll them up a plank. The shooter prototype is waiting on parts to make for a much faster shooter wheel. The bridge device is still in the designing phase but there has been a good amount of progress on that front.
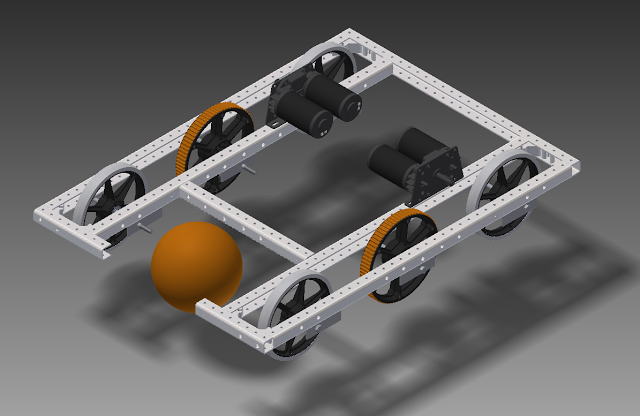
Here is the current setup for our chassis and drive train, we should have the parts in this weekend to begin building the real version.

We’re learning new things about the problems each day. For example we believe that if we shift most of our weight over the back two wheels of the robot we should be able to stay on the bridge even if are front wheels are hanging off the bridge. This will make it easier to balance and also possibly allow us to balance with 3 robots on the bridge if it comes to that.
The controls team is making a lot of progress for the FIRST week, it helps that we have a test chassis for us to test code. We’ve started getting feedback control working on the drive system so that we can electronically brake our wheels for shooting. We also have started thinking about automating the collector and the shooter intake mechanism.
We constructed a rim and backboard so we can start aiming with the camera as soon as it arrives this weekend.
We’re approaching to the point where we will be waiting for deliveries before we can make more progress. I’m trying to avoid this by ordering quickly but it doesn’t always work our that way.
The first week has been smooth, no major problems yet. I’m hopeful we can maintain that once we start building the real robot.
– Allen Gregory
“It is common sense to take a method and try it. If it fails, admit it frankly and try another. But above all, try something.” – Franklin D. Roosevelt

