Design Review #1
On Tuesday’s during the season we have our design reviews. We use a common google slide document to collect design ideas, and then also to present subsystem progress to the entire team.
Today’s review was mostly going over all the notes people have taken on past robots and ideas for things to include in our robot. Here are a few slides from our notes.

Shooter Intake Locations
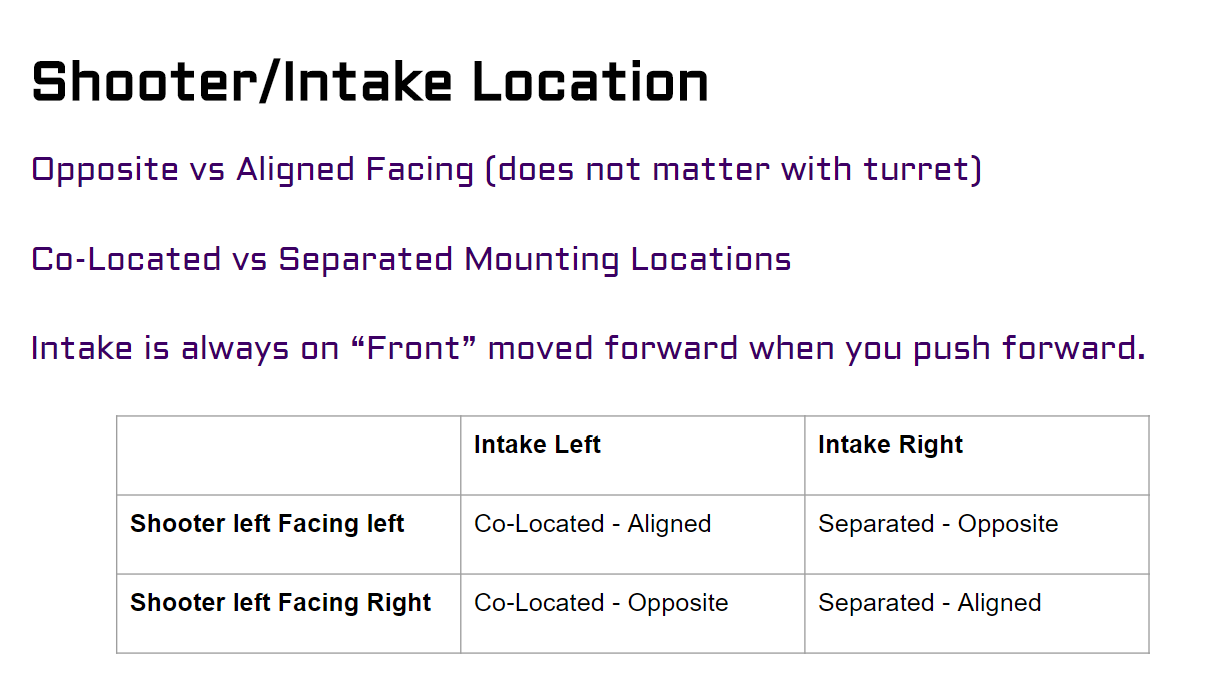
Our current plan is to have the intake on one side of the robot and the shooter facing the opposite direction (Opposite – Separated) so we can easily acquire more balls in autonomous or from the feeder station and return to a shooting position without turning around. The feeder station may also be able to roll balls directly towards our intake.
Initial Subsystems List
We have a rough subsystem list of ideas we are currently pursuing. (robot will 45″ tall)
1. Drive Train – 4x 6″ Pneumatic – 2x Omni – 4 Falcon – Shifting (10.4fps – 19fps)
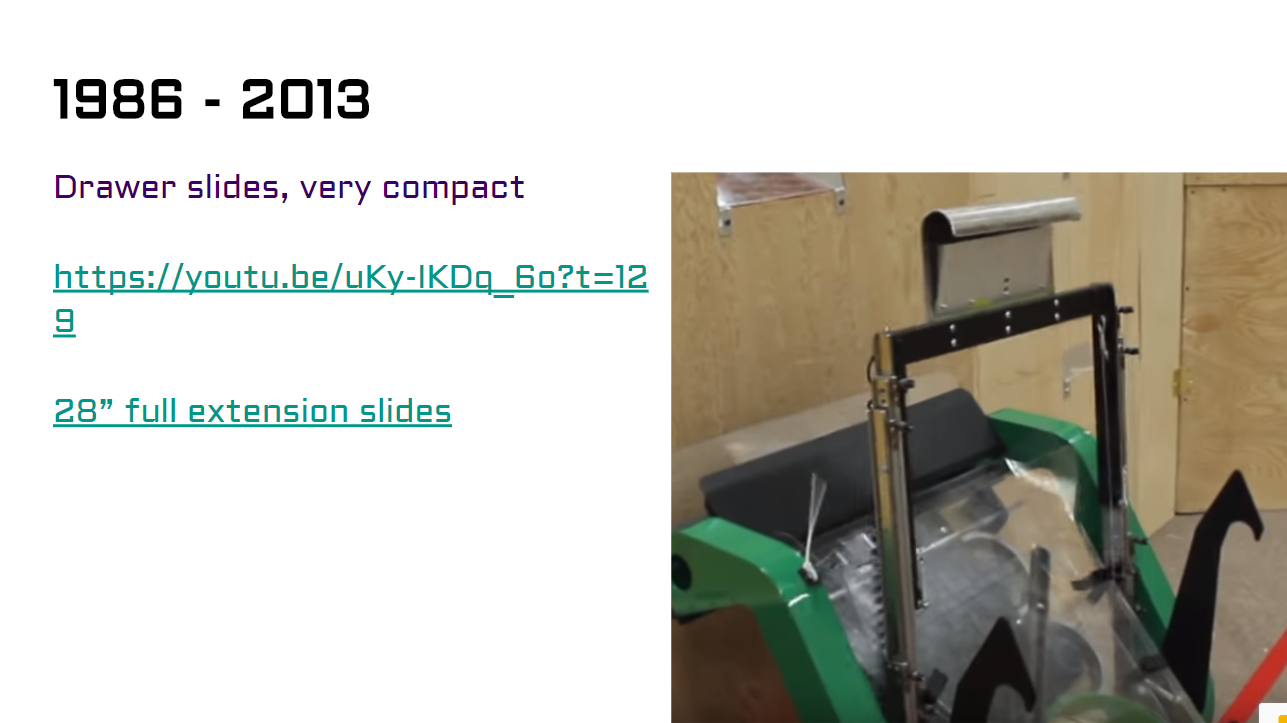
2. Climber – Extending drawer slides
3. Intake – Simple rollers over the bumper, limited to ~ 3 balls wide, funnels to 2 balls.
4. Ball Path – Smaller area funnels 2 balls into a single file belt tower up to the shooter
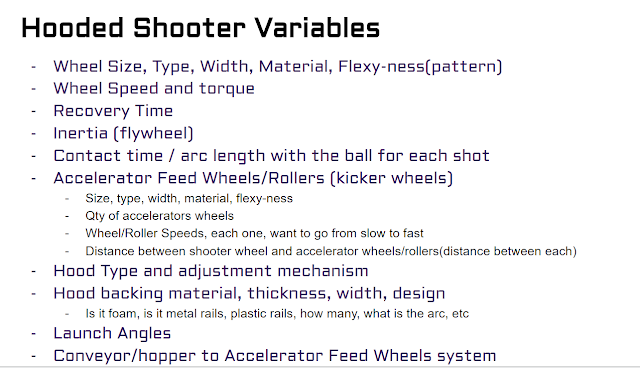
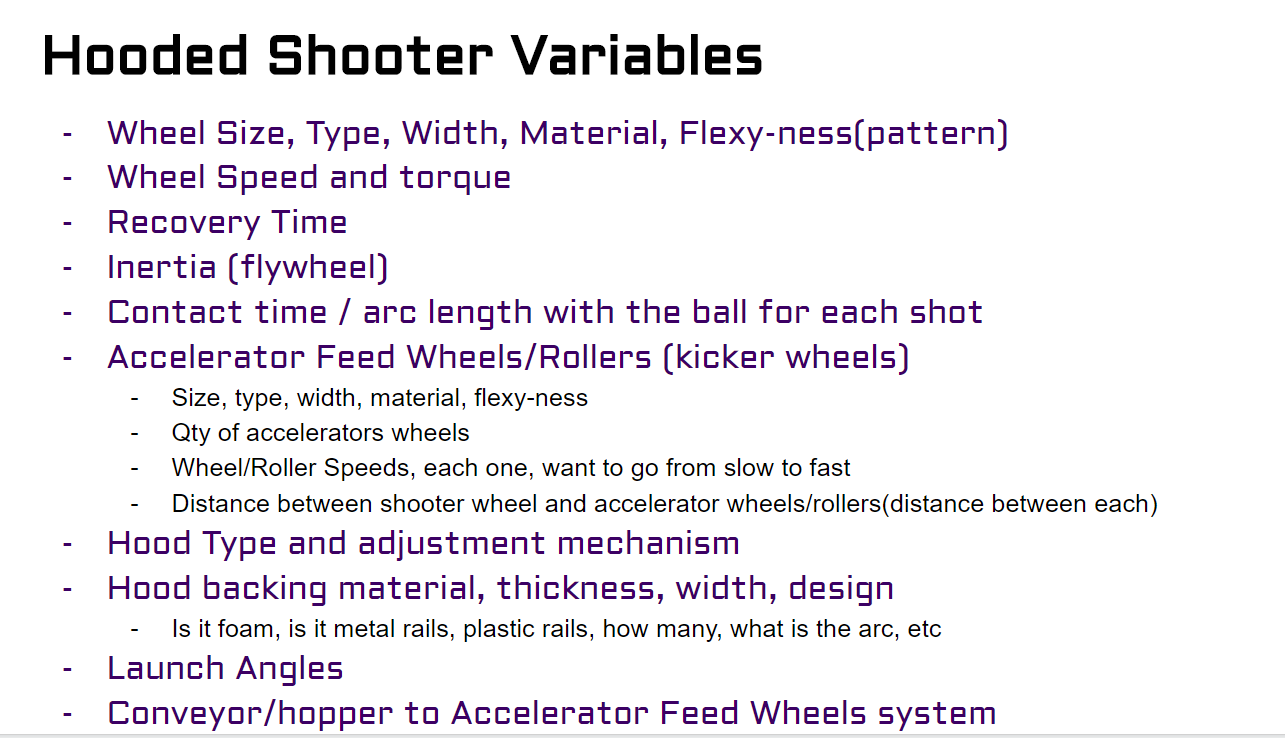
5. Shooter – Accelerator Wheel(s) and Shooter wheel with adjustable hood.
6. Buddy Forks- After we are hooked on, forks deploy under our robot that allow a <28″ tall partner robot to drive under us and then we lift both of us higher into the air for both climbs.
7. Control Panel Spinner – Single NEO 550 in a VP or Ultraplanetary, driving two vertical rollers with a REV color sensor over the top of the wheel.
Robots That Inspired us Today
2010 – 469 (ball cycle)
2012 – 341 (Angled Bumpers, 3-2-1 Intake Path – Opposite Facing Intake/Shooter for Auton, Low CG), 987 (Narrow intake was able to be very effective)
2013 – 469 (full court or cycle)
Spectrum
Source: Spectrum