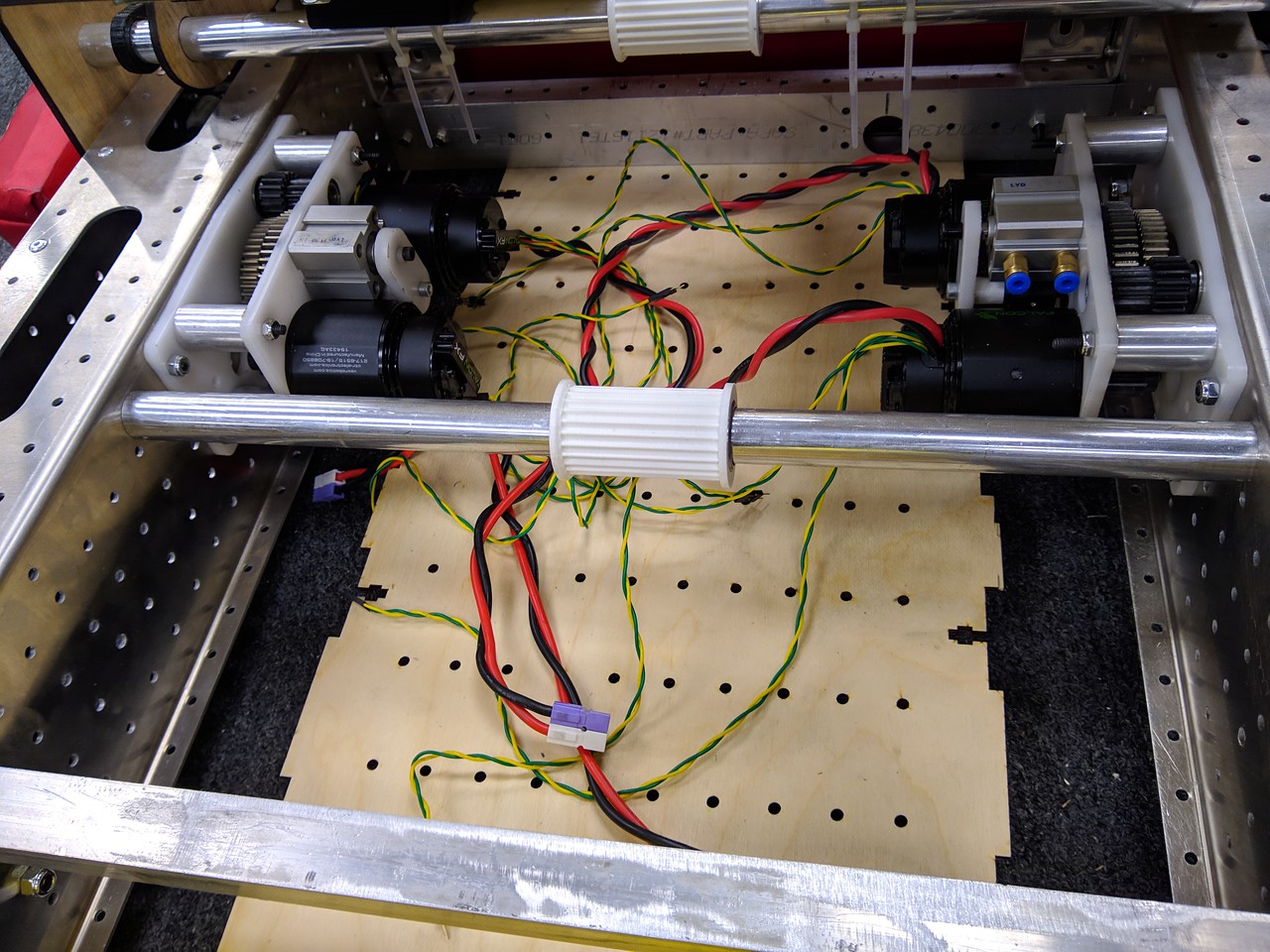
Falcon Pinions
We ran into our first issue with the Falcon 500s are second batch of pinions were a tight fit on the falcon shafts which is a known issue and is discussed in that thread. We used a wire wheel brush similar to ones in this kit. It took some of the nice black finish off the front of the falcon with it but it worked to take the shaft OD down enough to get a nice slip fit for pinions. We noticed that most of the pinions prefer to go on to the shafts a certain side first. When slipped on to the shaft the other direction they seem to stop sooner but when you turn them around they slip all the way down after the wire wheel.
Protobot Progress
Our protobot intake, indexer, and drive train are coming along.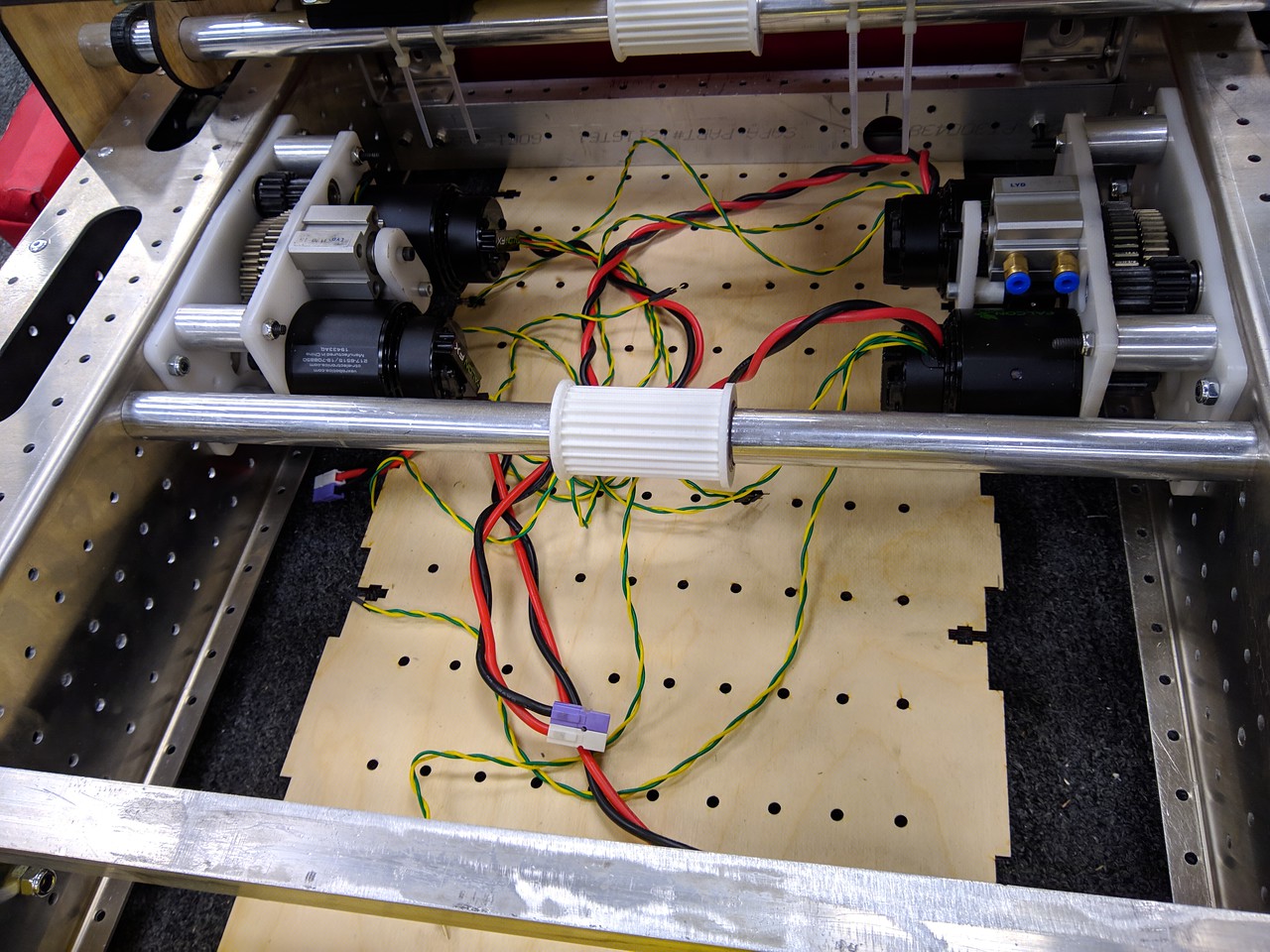
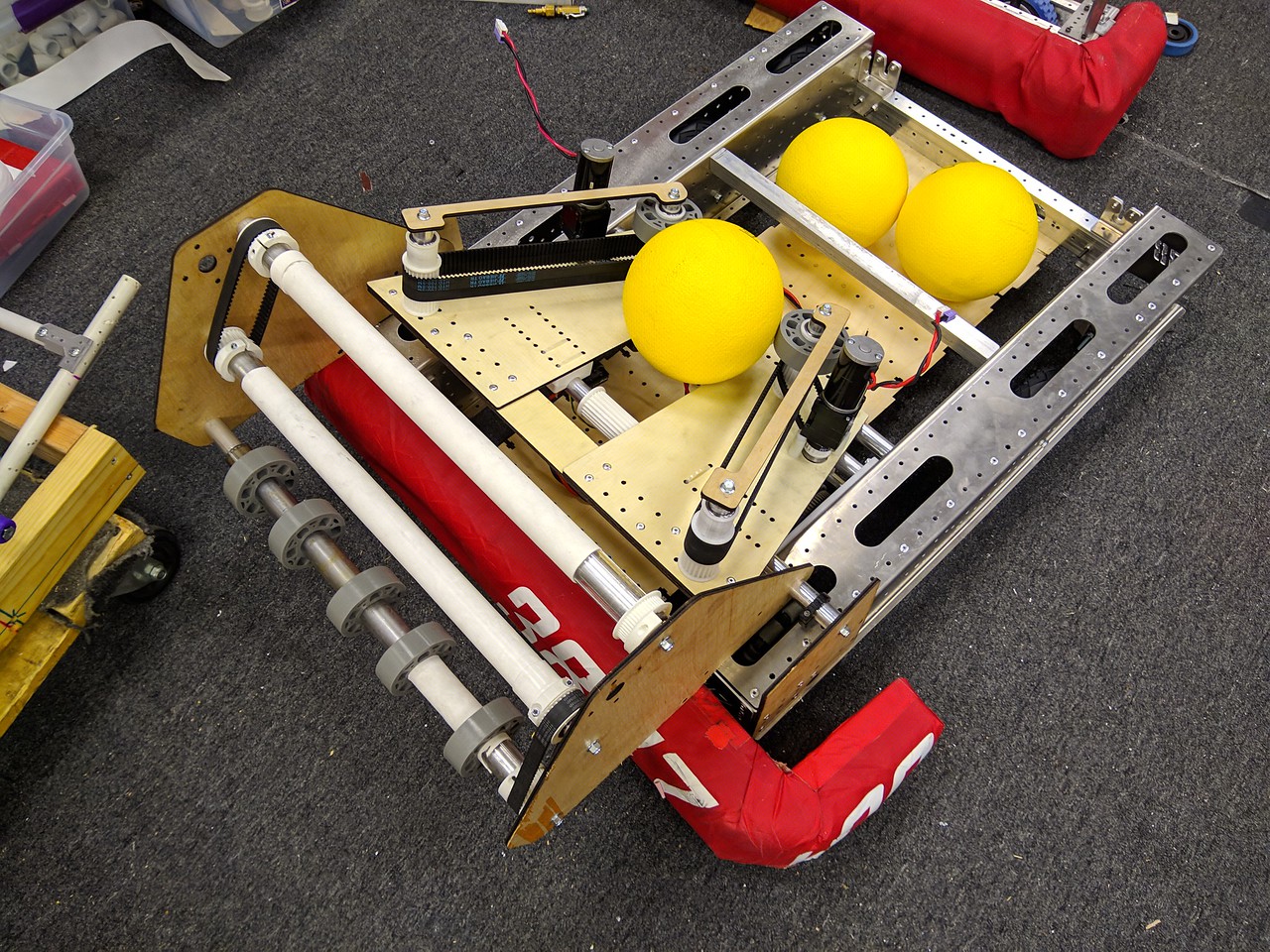
Small incremental improvement are on the way, which is why we are doing it on a full prototype robot. So we can drive it and make changes for the comp robot to handle the balls better.
Spectrum
Source: Spectrum