Largely we have been getting more of our subsystem designs CADed.
Shooter Design
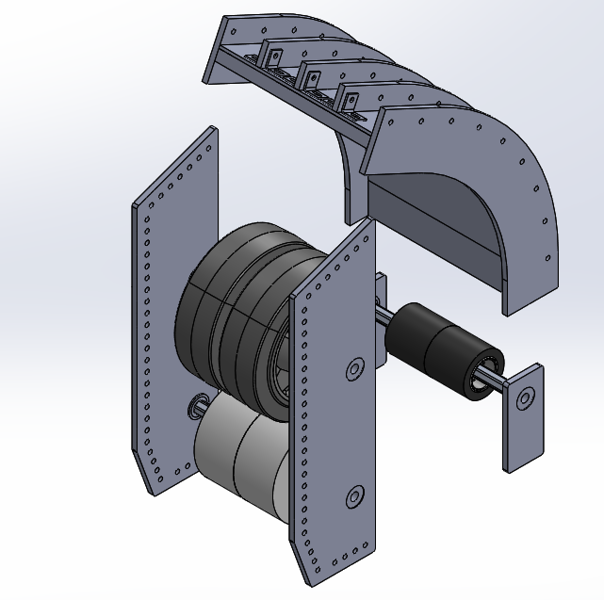
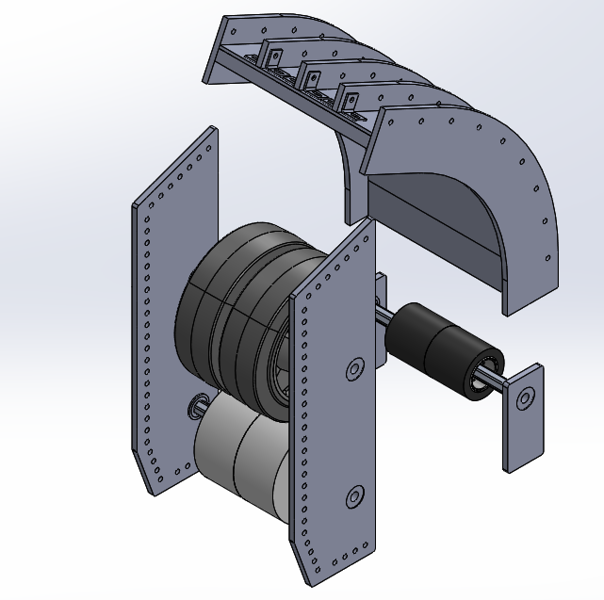
We are experimenting with adding a rear kicker wheel to the shooter setup. The idea being to have more linear acceleration into the shooter wheel and less spin. It would be powered off the front accelerator wheel using polycord in a figure 8.
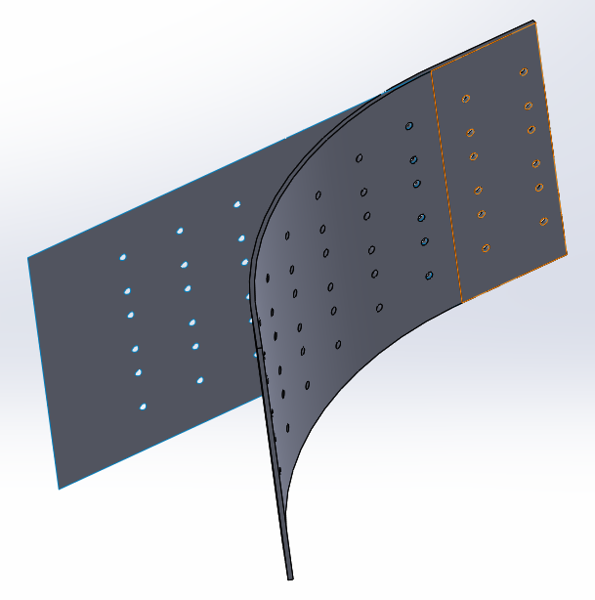
We have learned to use Solidworks surfaces to allow us to CAD a curved shooter hood and then unwrap it so we can easily laser cut it from a flat piece of material.
Funnel
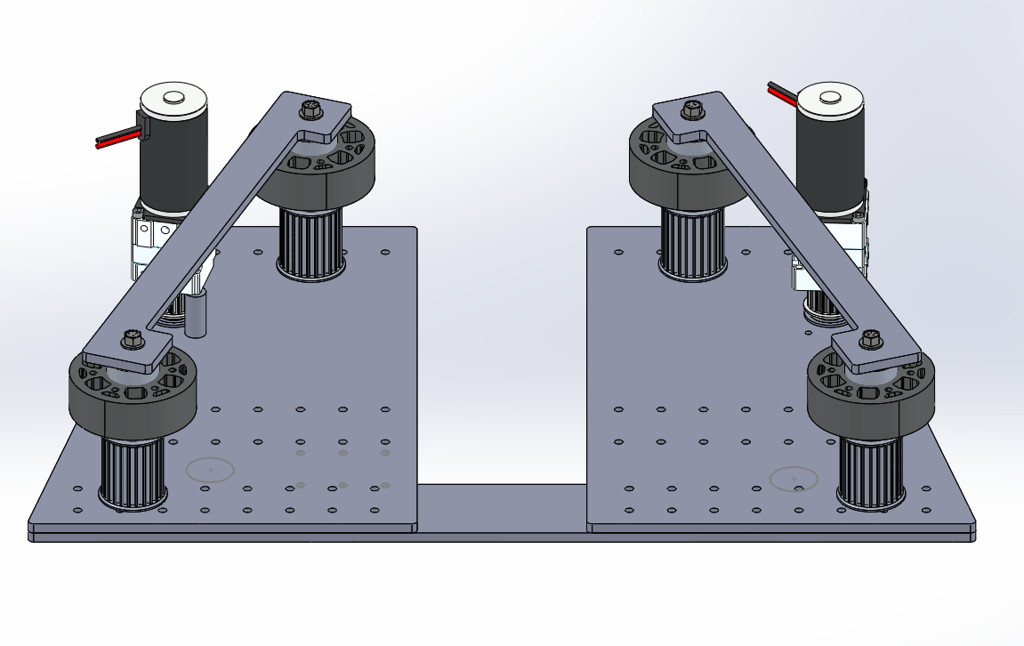
The Powered V funnel (based on FRC#6135’s design), is moving along. We will have custom printed pulleys on 7/8″ dead axles with 30mm wide, 5mm pitch timing belts to move the balls along. The BAG motors will be replaced by NEO550s in the real robot.
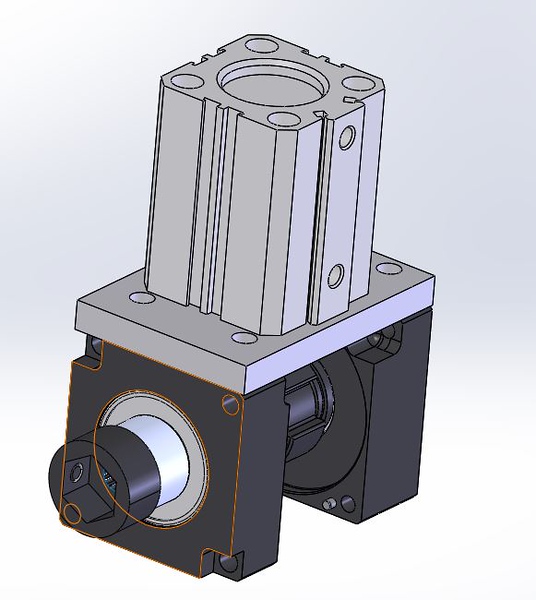
Climbing Brake
Last year we intended to use a VP ratchet slice to hold our robot after the match, but the standard ratchet slice never really worked. We ended up using a pneumatic cylinder driving into the ratchet adapter. We may be using a similar mechanism again this year.
Spectrum
Source: Spectrum

