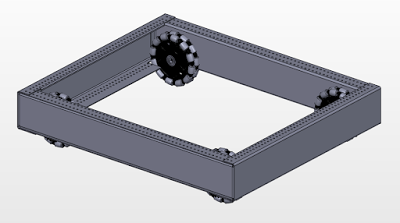
Drive Train
Drive train CAD is starting to progress. We’ll get the gearboxes and belly pan on over the weekend, and start working on the mounting points for the A F-frame.

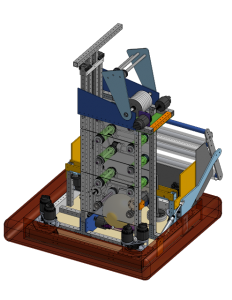
Intake
The prototype virtual 4 bar intake is progressing, but we still haven’t gotten fully functional. Ideally this weekend we have version 2 to the point of collecting cubes. We’ll need to make a decisions to continue optimizing this design or change course soon. Luckily the intake doesn’t have to slow down progress on the rest of the robot.
Climber
Cable management is going to be a big issue for when we have the tailgate and winch installed in the robot. The rope needs to be able to move and extend with the arm during the match, and then pulley free from the arm to allow the winch to pull directly to the hook. Today we prototyped lexan flaps that are close with Velcro. The rope will ride in these flaps through out the match and then be able to pull open the doors once the winch cable is under tension. As for allowing the cable to extend and retract we are going to prototype a system that uses a coil of pneumatic tubing to spring the rope back when it’s not in tension, the pneumatic tubing coil should arrive on Monday.
– Spectrum
“I’ve seen how you can’t learn anything when you’re trying to look like the smartest person in the room.” – Barbara Kingsolver
Source: Spectrum