One of the projects we have added this year is building an MCC robot with some our new students. This gives us the ability to have them build, wire, and program a robot before the design for our actual 2019 robot is complete. It’s also lets us have a robot to practice with/against and an example robot for the teams that we help throughout the season.

The goals for this robot are to be similar to those we explained in the FRC Guide to the MCC. We want this robot to be the 3rd robot on a competitive alliance.
We are still developing this but we wanted to get the basic idea published as teams are starting to finalize their designs and we hope some teams will be able to use ideas from this design to help them this season.
Strategic Analysis and Features
HAB
The current version of this robot ignores the HAB end game. It can drop off of HAB lvl 2 to start the match but is unable to climb up to lvl 2 or lvl 3 at the end of the match. It is a rather light robot and most of its weight is in the rear so it may be a good choice for a robot that lifts others on to the lvl 3 platform. Only 1 or 2 robots will be able to climb to lvl 3 in each match and it’s likely that the highest seeded teams will be able to climb on their own so building ramps (also ramps are just hard in general) or other mechanism will most likely not help get you picked by high ranking teams. If you take anything from this please let it be that ramps are harder than you think, and teams are very bad at driving up ramps so please be very cautious when deciding to build a ramp bot (or better yet just don’t build a ramp bot).
Hatch Panels
The hatch mechanism on this robot isn’t fully flushed out but it will be able to score on all lvl 1 hatches using pneumatics and velcro. There is also enough room on the back for an alternative hatch mechanism if your team develops something else better than velcro and pneumatics to push the hatch off.
Cargo
Cargo is where this robot shines and is where we believe the most productive 3rd robots will have their strengths. Each cargo cycle is worth 50% more than a hatch cycle and you can start the game with 6 null hatches pre-installed giving you 6 free 3pt cargo cycles before you need to do a hatch cycle for 2 points.
- Floor loading lets this robot utilize the depot for its cargo cycles and free up the loading stations for the faster robots on its alliance who may have well practice or pre-programmed paths to/from the feeder station. Floor loading reduces your cycle time because it’s possible that the balls will roll across the ground and come near your robot without you having to go back into the HAB.
- The in-frame intake mechanism means that while playing defense this MCC could take a cargo ball and bring it back to their side of the field to score. This will slow down the cycle time of their opponents.
- The single jointed arm can lift the cargo ball to score it in
- Rocket Level 1
- Rocket Level 2
- the Cargo Ship
- Those 3 scoring locations add up to a potential of 14 cargo scoring locations (not counting the 2 front cargo ship spot that start with cargo).
- Having the ability to score in Rocket Lvl 2 means that if this robot is paired with a robot that can hatch lvls 2 & 3 and score cargo in lvl 3, each of them only needs to score 6 game pieces to be able to complete the rocket and get the ranking point.
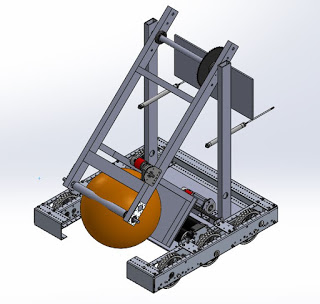
Mechanical Details
- Kitbot drive base
- The pictures shows a square 28″x28″ AM14U3 because that is the drive base we happen to own but any kit chaiss dimension can perform this role, you would just have to change some of the dimensions of the arms and tower. A wider kit bot could have a wider intake, a longer kit bot may have more room for a hatch mechanism on the back.
- Reminder to make sure you cut your kit chassis to be within the 120″ frame perimeter rule.
- Structure
- The design uses mostly 2×1 and 1×1 aluminum extrusion but it most of the cases this could be exchange for other materials that you already own or that you like to use. A robot with similar abilities can be built from wood, REV extrusion, Andymark Peanut extrusion and many more options.
- The CAD doesn’t include all the gussets that would be needed to connect all the parts together.
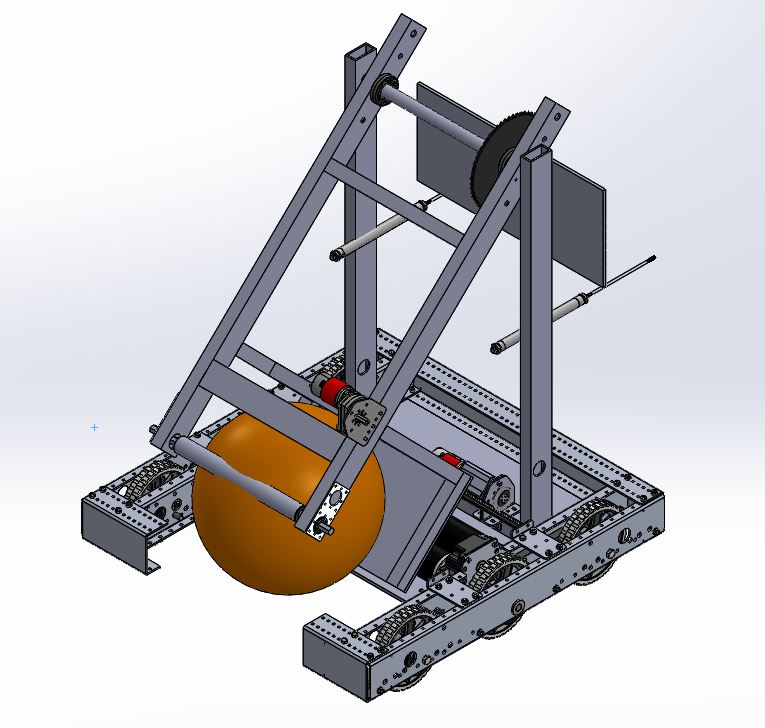
- Single Jointed Arm
- A single motor, gearbox, and chain reduction is able to move the cargo intake up to score.
- There are a variety of ways to build a single jointed arm, the images show a AndyMark 100:1 57 gearbox mounted to two REV Universal Motor Brackets, driving a VEXpro 12t to 60t sprocket reduction.
- Surgical tubing would be added to the arm bars at the rear to help counterbalance the arm.
- Intake
- The intake is a simple roller, this could be wheels or a drum as shown in the images. The drum is based on the VEXpro Versaroller System.
- Many different gearboxes could power the intake including a Versaplanetary, or AM 57 Sport. Another option is to use the Two Sport Gearbox that teams received in the kit of parts but only install a single motor, that is what is shown.
- Hatch Mechanism
- Single pneumatic solenoid valve drive the two cylinder to release it from our velcro.
- Similar to prototype we posted here.
With only 2 motors and one solenoid valve used for scoring this Destination Deep Space robot would be very simple but able to contribute a lot during match it plays.
This CAD was done very quickly just to be a visual tool to help teams understand our plan. We will be developing it more before building our version of the Spectrum MCC this season. Much of the systems are incomplete so only use this as a model to get ideas from and not detailed plans to build a complete robot.
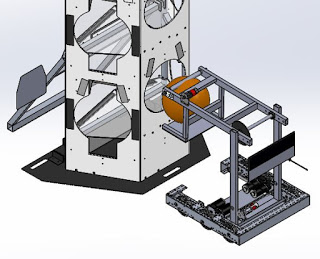
Spectrum MCC
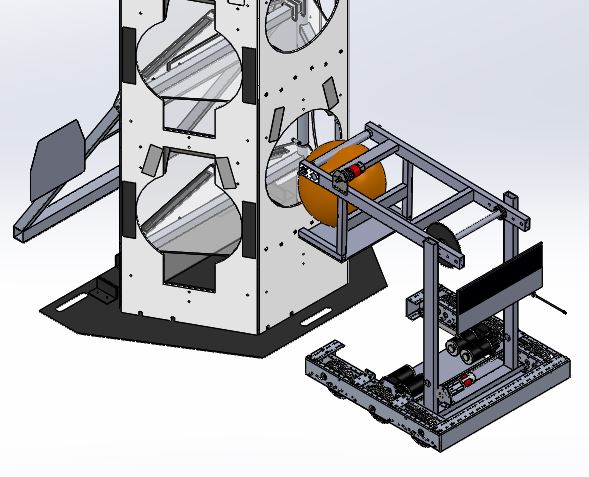
Scoring on Lvl 1 of the Rocket
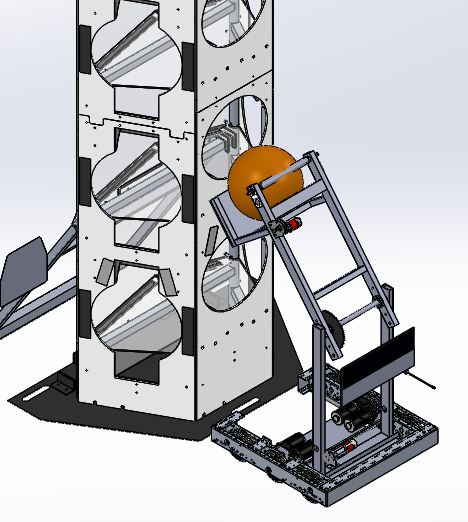
Scoring on Lvl 2 of the Rocket
– Spectrum
“That’s been one of my mantras — focus and simplicity. Simple can be harder than complex: You have to work hard to get your thinking clean to make it simple. But it’s worth it in the end because once you get there, you can move mountains.” – Steve Jobs 1998
Source: Spectrum

