Really quick update today. We are moving along on revisions to CAD for the protobot so we can them fixed in time for competition robot production starting in earnest this weekend.
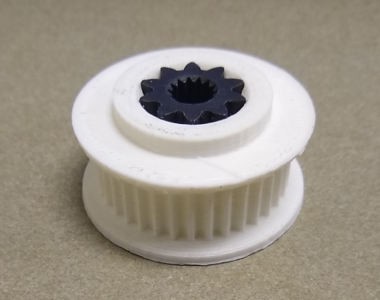
We are moving to use a 3D printed pulley on our falcon shooters using a 10t falcon pinon gear as a mating spline. A few other teams have shown off this method and it should work nicely for our situation.
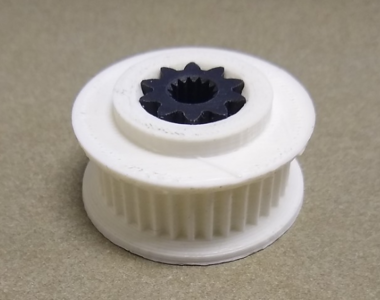
Posted the file for this model here – https://grabcad.com/library/36t-3mm-pulley-10t-20dp-vex-gear-bore-1
Spectrum
Source: Spectrum
